
背景知识
- 3D物体检测的重要性:随着机器人和增强现实等领域对智能解决方案需求的增加,从点云中进行3D物体检测成为一项关键技术。它能够同时实现3D物体的定位和识别,在机器人、增强现实和3D扫描等领域有广泛应用。
- 现有数据集的局限性:现有的室内数据集 individually 规模较小且多样性不足,难以训练出强大且通用的3D物体检测模型。不同数据集之间的领域差距较大,因为室内数据的捕获传感器不同,导致点云密度和场景覆盖范围不一致。
- 现有方法的不足:使用视觉语言模型的3D场景理解方法在开放词汇问题上表现出色,但在3D实例分割和3D物体检测中的准确性仍不及基于监督训练的方法 。而目前基于监督训练的3D物体检测方法虽然在特定数据集上表现良好,但在泛化到新场景和未见物体方面存在不足,且无法有效处理新类别。
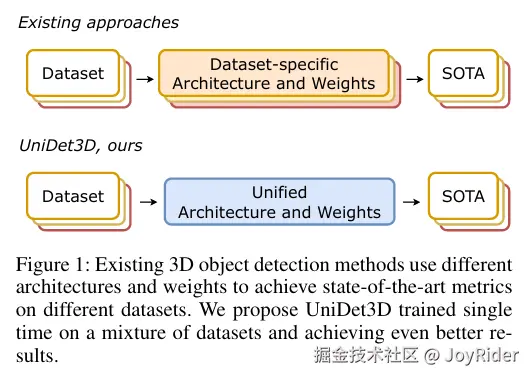 图1展示了现有的3D物体检测方法通常针对不同数据集使用专门的架构和权重来实现各自的最佳性能,而本文提出的UniDet3D模型则通过在混合数据集上进行一次训练,就能在多个室内场景数据集上均取得优异甚至更好的结果,体现了其在多数据集通用性和检测性能上的优势。
图1展示了现有的3D物体检测方法通常针对不同数据集使用专门的架构和权重来实现各自的最佳性能,而本文提出的UniDet3D模型则通过在混合数据集上进行一次训练,就能在多个室内场景数据集上均取得优异甚至更好的结果,体现了其在多数据集通用性和检测性能上的优势。
研究创新点
- 多数据集联合训练:提出了一种简单有效的3D物体检测模型UniDet3D,通过在多个室内数据集的混合数据上进行训练,使模型能够在各种室内环境中工作,提高了模型的泛化能力。
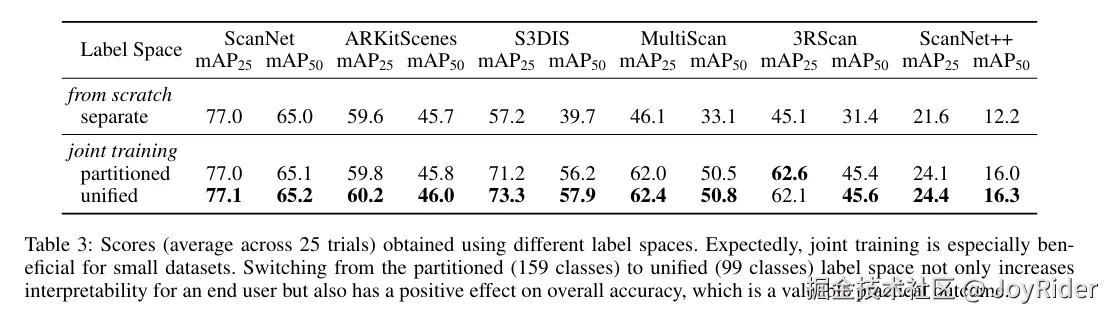
- 标签空间的统一:将不同数据集的标签空间统一,创建了一个多数据集3D物体检测方法,解决了不同数据集标签不一致的问题,使模型能够在一个共享的标签空间中进行学习和预测。
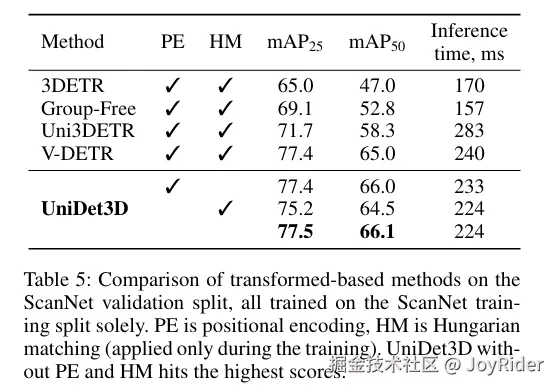
- 网络架构的简化与优化:基于纯自注意力编码器架构设计网络,无需位置编码和交叉注意力,降低了计算开销,同时也便于用户根据需求进行定制和扩展。此外,还引入了一种简单有效的解耦匹配方案,取代了传统的匈牙利匹配算法,进一步提高了模型的训练效率和性能。
方法细节
- 主干网络和池化:使用稀疏3D U-Net网络从输入点云中提取逐点特征。然后通过超点池化层将点特征在超点内进行平均池化,以获得超点特征。
- 变换器编码器:将超点特征作为查询输入到一个简单的变压器编码器网络中,该网络仅基于输入查询之间的自注意力进行处理,输出对象提议特征。
- 头部设计:头部接收对象提议特征,并通过线性层为每个提议生成一个3D边界框和一个类别标签。分类层输出对象类别的概率,边界框参数通过回归层进行估计。
- 训练策略:
- 成本函数:结合分类概率和预测边界框,使用成对匹配成本来衡量提议和真实对象之间的相似性。
- 匹配策略:假设超点只能属于一个对象,将每个对象与三个最近的超点匹配,简化了成本函数优化过程。
- 损失函数:在匹配提议和真实实例后,计算分类误差的交叉熵损失和边界框回归的DIoU损失,并将两者组合起来形成总损失函数。
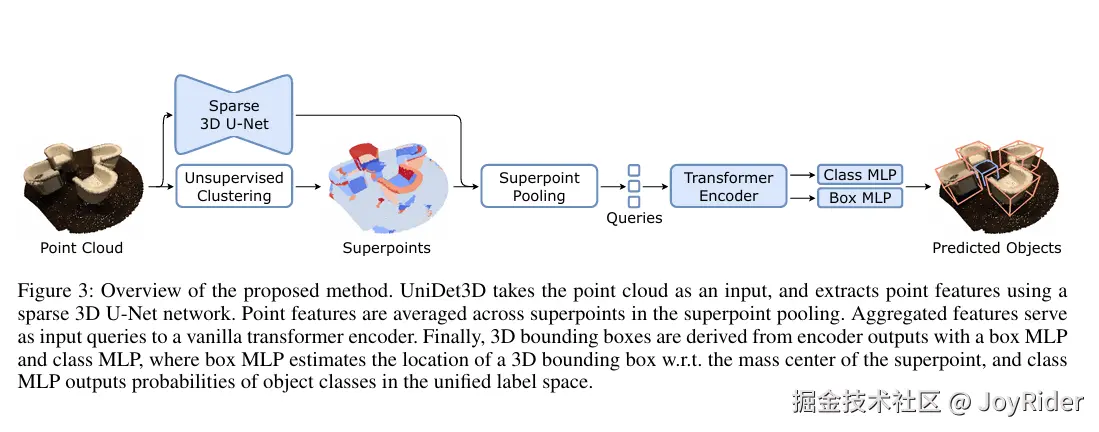
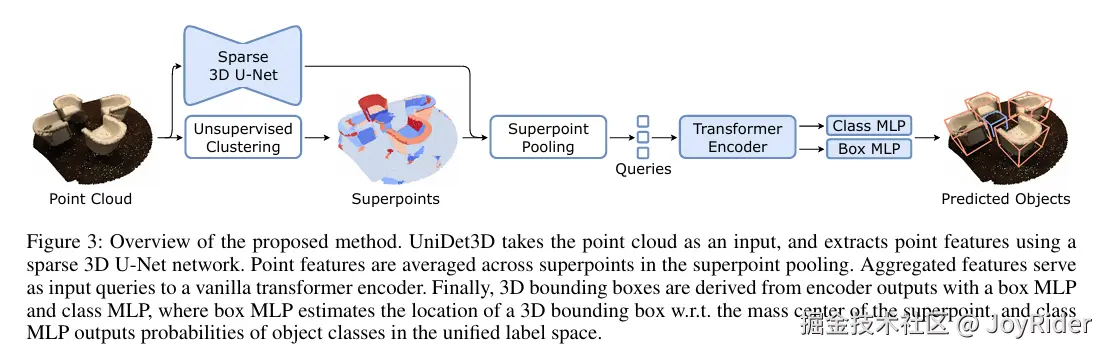 图3展示了UniDet3D的整体结构,输入的点云数据首先通过稀疏3D U-Net网络提取逐点特征,然后利用超点池化将点特征在超点内进行平均池化得到超点特征,这些特征作为查询输入到纯自注意力的变换器编码器中,编码器输出的对象提议特征再分别通过两个多层感知机(MLP),一个用于估计物体边界框的回归参数,另一个用于预测多数据集共享标签空间中的类别概率,从而实现对3D物体的检测。
图3展示了UniDet3D的整体结构,输入的点云数据首先通过稀疏3D U-Net网络提取逐点特征,然后利用超点池化将点特征在超点内进行平均池化得到超点特征,这些特征作为查询输入到纯自注意力的变换器编码器中,编码器输出的对象提议特征再分别通过两个多层感知机(MLP),一个用于估计物体边界框的回归参数,另一个用于预测多数据集共享标签空间中的类别概率,从而实现对3D物体的检测。
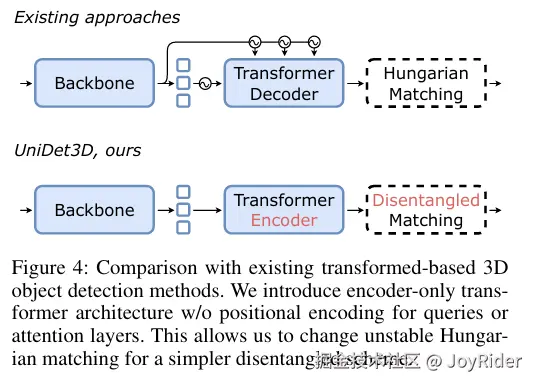 图4对比了现有的基于变换器的3D物体检测方法与本文提出的UniDet3D的架构差异。传统的变换器方法依赖于包含位置编码的主干网络和带有交叉注意力的变换器解码器,而UniDet3D则采用简化的纯自注意力编码器架构,无需位置编码和复杂的交叉注意力机制,从而降低了计算复杂度并提高了模型的灵活性和可扩展性。此外,UniDet3D还引入了解耦匹配方案取代传统的匈牙利匹配,进一步简化了训练过程。
图4对比了现有的基于变换器的3D物体检测方法与本文提出的UniDet3D的架构差异。传统的变换器方法依赖于包含位置编码的主干网络和带有交叉注意力的变换器解码器,而UniDet3D则采用简化的纯自注意力编码器架构,无需位置编码和复杂的交叉注意力机制,从而降低了计算复杂度并提高了模型的灵活性和可扩展性。此外,UniDet3D还引入了解耦匹配方案取代传统的匈牙利匹配,进一步简化了训练过程。
实验结果
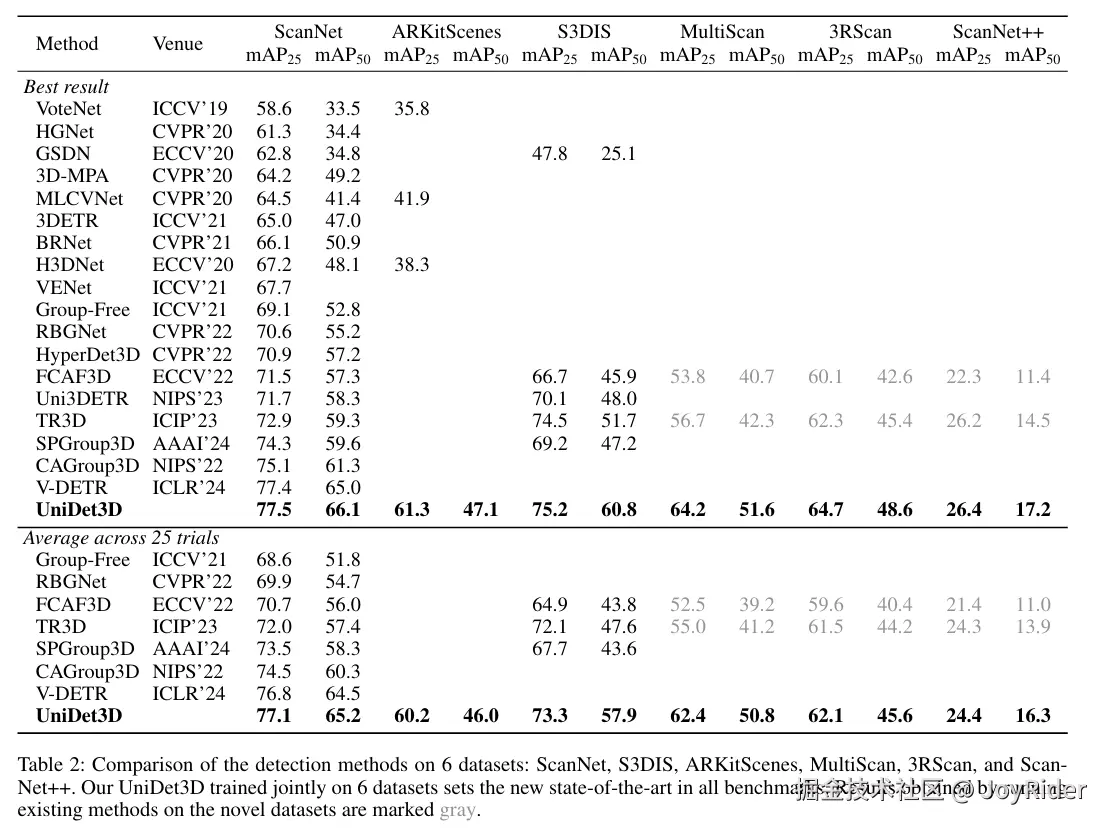
- 数据集评估:在六个真实的室内基准数据集上进行了评估,包括ScanNet、ARKitScenes、S3DIS、MultiScan、3RScan和ScanNet++。这些数据集涵盖了不同的场景类型和物体类别,具有不同的规模和特点。
- 性能指标:使用mean average precision (mAP)在IoU阈值为0.25和0.5的情况下作为评估指标,并对输入点云中的点数进行了限制,以确保实验的可比性和公平性。
- 与其他方法的比较:UniDet3D在所有基准测试中均取得了最佳性能,显著优于现有的3D物体检测方法。在ScanNet上mAP50提高了1.1,在ARKitScenes上mAP25提高了19.4,在S3DIS上mAP50提高了9.1,在MultiScan上mAP50提高了9.3,在3RScan上mAP50提高了3.2,在ScanNet++上mAP50提高了2.7。
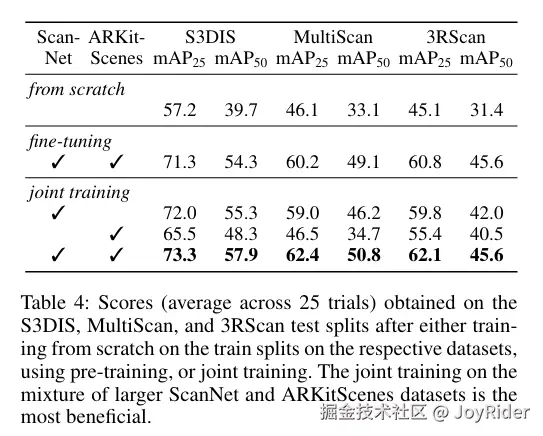
- 消融实验:通过消融实验验证了不同训练方案(从头开始训练、微调和联合训练)对模型性能的影响,结果表明联合训练方案能够显著提高模型在小数据集上的性能。同时,统一标签空间相较于分区标签空间也能带来性能提升。此外,实验还表明,移除位置编码和匈牙利匹配后,模型的性能并未下降,反而在计算效率和内存占用方面有所改善。
总结
尽管模型能够在多个数据集上进行联合训练并取得良好效果,但其性能在很大程度上依赖于所选数据集的质量和多样性。首先,如果数据集中存在偏差或某些特定类别的数据不足,可能会影响模型在相关场景下的检测性能。
此外,虽然UniDet3D在室内3D物体检测任务上表现出色,但其主要针对的是室内场景,对于室外或更复杂的环境下的3D物体检测可能并不适用,应用场景相对有限。同时,尽管提出了简化的网络架构和匹配策略,但由于涉及到多个数据集的联合训练以及标签空间的统一等操作,整体训练过程仍然相对复杂,对计算资源和存储的要求较高,这可能限制了其在资源受限环境中的应用。
最后,与一些基于视觉语言模型的方法不同,UniDet3D主要依赖于监督学习和预定义的标签空间,对于新出现的、未在训练数据集中出现的物体类别,模型可能无法有效识别和检测,缺乏一定的开放词汇检测能力。
评论记录:
回复评论: