
1 纵向小扰动方程
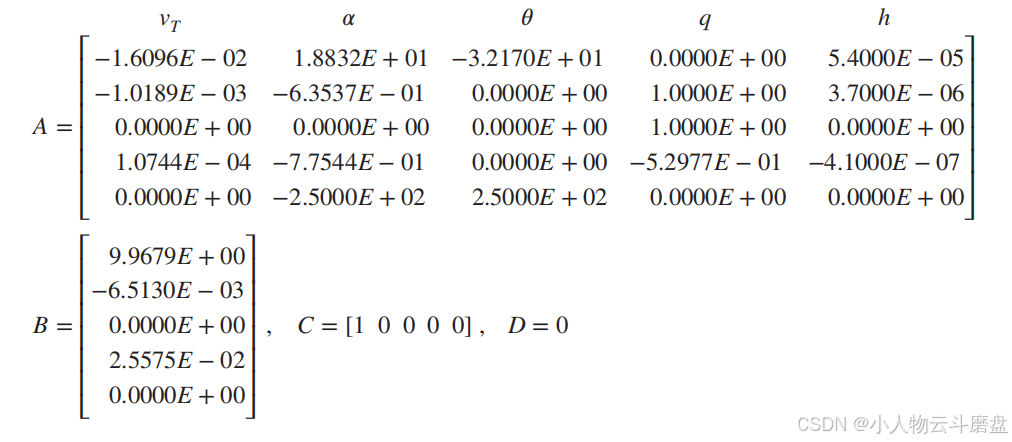
系统纵向小扰动方程的状态空间方程为
x
˙
=
A
x
+
B
u
\dot{x}=Ax + Bu
x˙=Ax+Bu
y
=
C
x
+
D
u
y=Cx+Du
y=Cx+Du
式中:
x
=
(
v
T
α
θ
q
h
)
x=(vTαθqh)
x=
vTαθqh
u
=
(
δ
t
)
u=(δt)
u=(δt)
使用参考文献[1]中Example3.8.5的模型:
2 编写MATLAB程序
%% ACS_E3_8_5
% Liang
% 20250116
% Clear
clear;
% 定义系统矩阵
A = [-1.6096E-02, 1.8832E+01, -3.2170E+01, 0.0000E+00, 5.4000E-05;
-1.0189E-03, -6.3537E-01, 0.0000E+00, 1.0000E+00, 3.7000E-06;
0.0000E+00, 0.0000E+00, 0.0000E+00, 1.0000E+00, 0.0000E+00;
1.0744E-04, -7.7544E-01, 0.0000E+00, -5.2977E-01, -4.1000E-07;
0.0000E+00, -2.5000E+02, 2.5000E+02, 0.0000E+00, 0.0000E+00];
B = [9.9679E+00;
-6.5130E-03;
0.0000E+00;
2.5575E-02;
0.0000E+00];
C = eye(5);
D = zeros(5, 1);
% 使用ss函数建立状态空间模型
g = ss(A, B, C, D);
% 显示状态空间模型
disp(g);
% 状态空间转换成传递函数
[num1, den1] = ss2tf(A, B, C, D, 1);
num1q = num1(1,:);
g_open = tf(num1q, den1);
% clsys1 = feedback(plant1, 1);
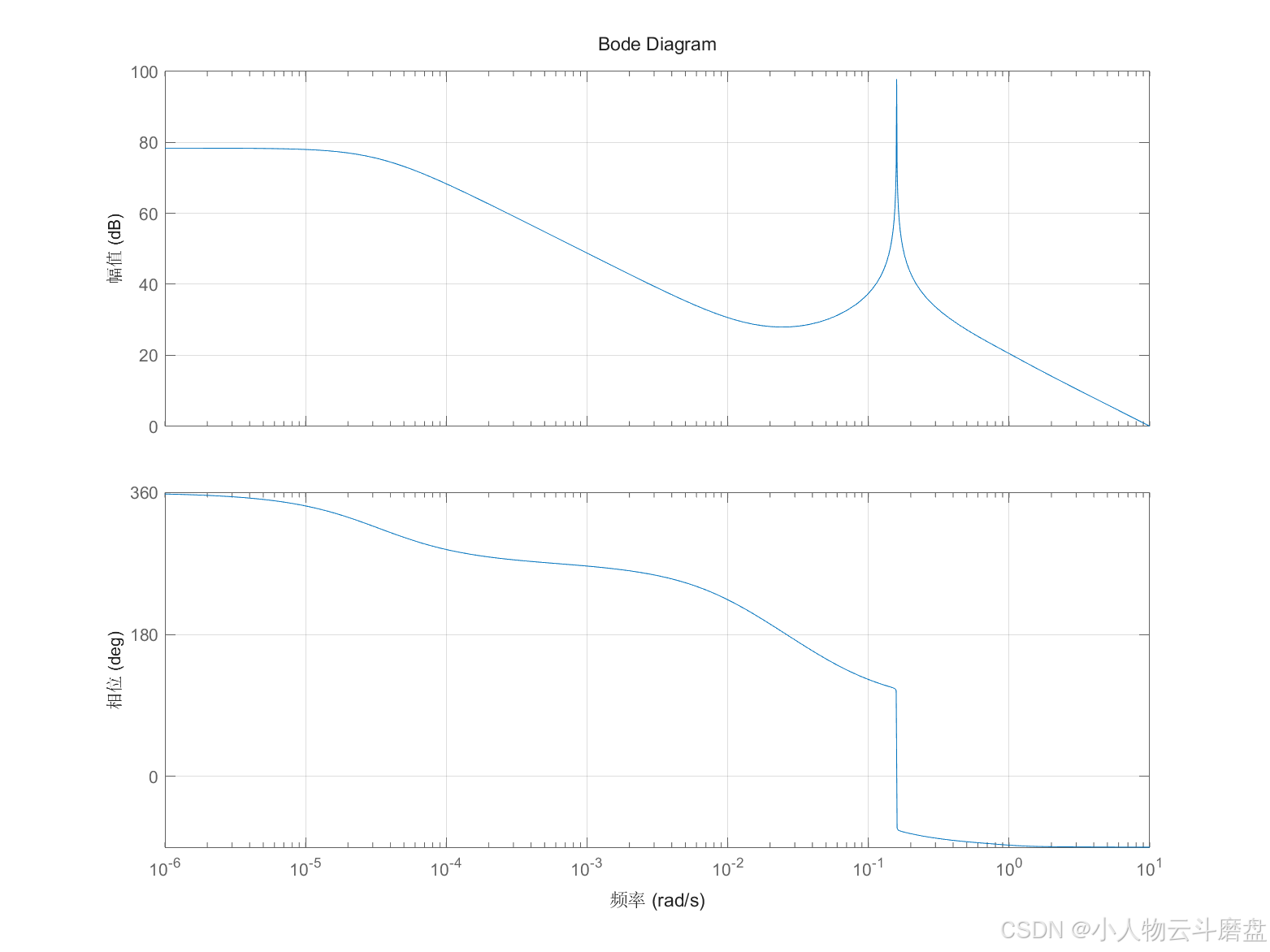
% Bode图
figure(25010301)
bode(num1q, den1);
grid minor;
grid on;
% Save
set(gcf, 'Position', [50, 50, 4*250, 3*250]);
saveas(gcf,'ACS_E3_8_5_bode','png');
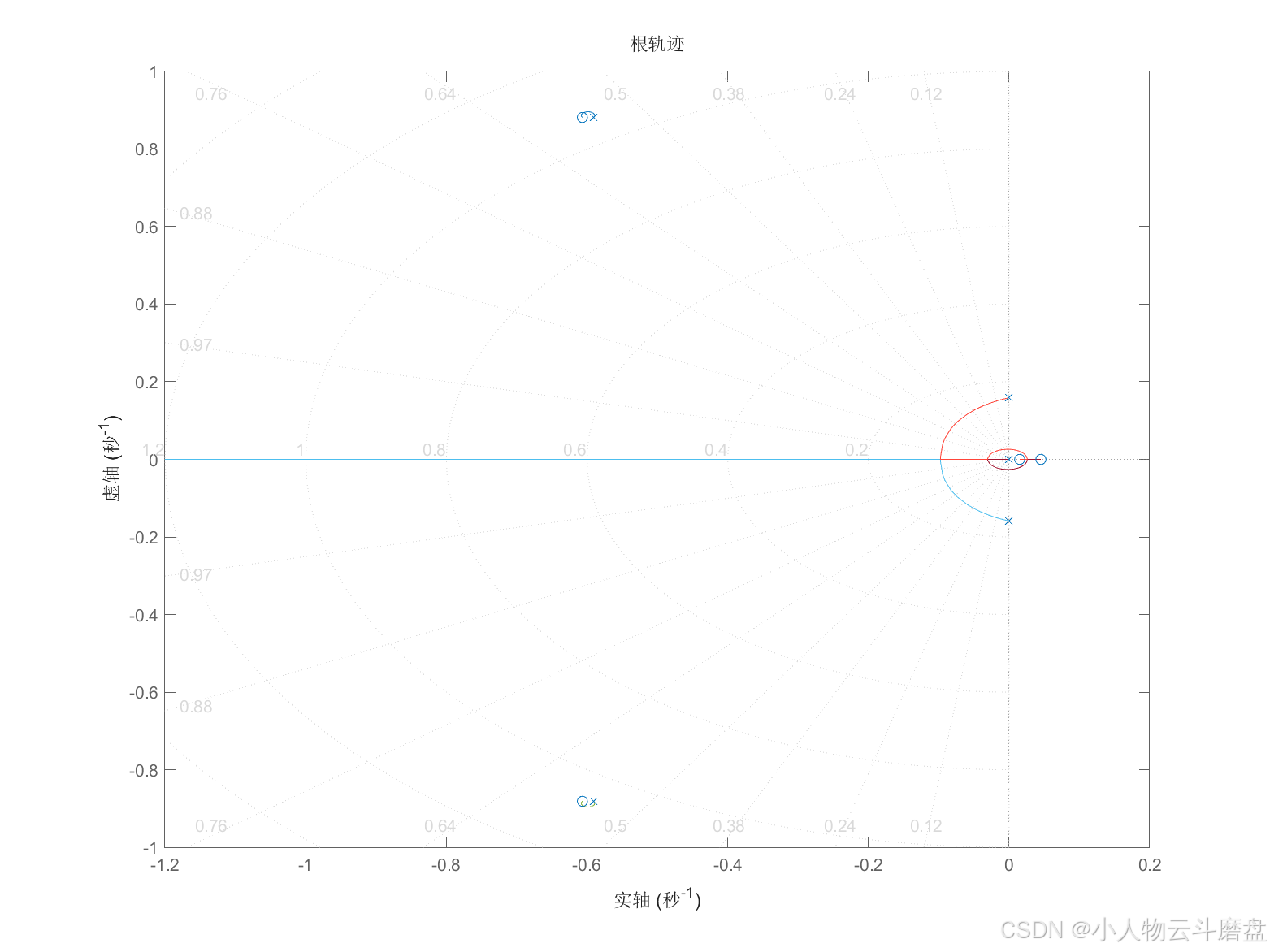
% 根轨迹
figure(25010302)
rlocus(g_open);
grid minor;
grid on;
% Save
set(gcf, 'Position', [50, 50, 4*250, 3*250]);
saveas(gcf,'ACS_E3_8_5_rlocus','png');

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
3 计算结果
[1] Brian L. Stevens, Frank L. Lewis, Eric N. Johnsson. Aircraft Control and Simulation[M]. 3rd ed. New Jersey: John Wiley & Sons, Inc, 2016: 211.
评论记录:
回复评论: