
蓝桥杯嵌入式第12届真题(完成) STM32G431
题目
程序
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "led.h"
#include "key.h"
#include "usart1.h"
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
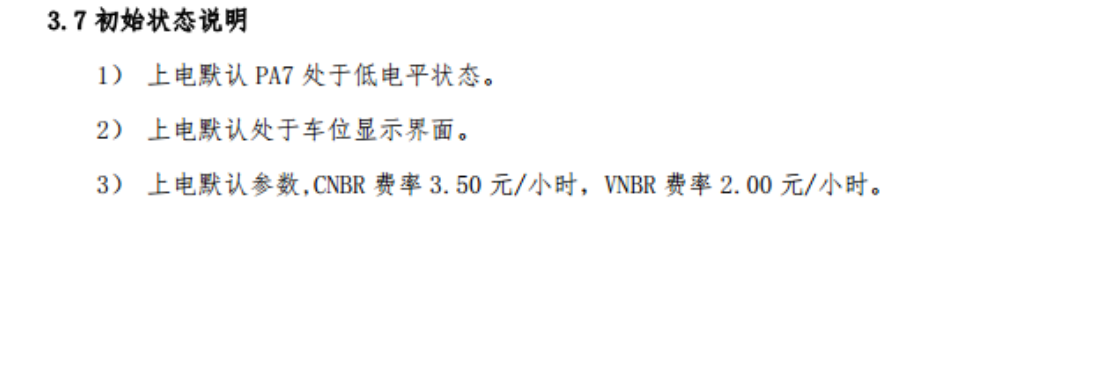
uint8_t view = 1;
uint8_t carnums = 8;
uint8_t CNBRnums = 2;
uint8_t VNBRnums = 4;
uint8_t IDLEnums = 2;
float CNBRprice = 3.50f;
float VNBRprice = 2.00f;
uint8_t lcdtext[20];
extern struct Key key[4];
uint8_t pwm = 0;
extern uint8_t rxflag;
extern uint8_t rxdata[1];
extern uint8_t rxindex;
extern uint8_t rxbuffer[22];
uint8_t cartype[4];
uint8_t carnum[4];
uint8_t cartime[12];
uint8_t printtext[30];
struct Times
{
int year;
int month;
int day;
int hour;
int min;
};
struct Cars // 串口接收
{
char carKind[5]; //车型
char carNum[5]; //车牌号
char carTime[12]; //进入时间
struct Times Time;
};
struct Cars car;
struct Cars park[8]={0,0,0,0,0,0,0,0};
float stopprice;
uint8_t led,led1enable,led2enable;
int monthDays[12] = {31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31};
uint8_t isError = 0;
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void key_process(void);
void usart1_process(void);
void lcd_process(void);
void led_process(void);
void outpark(uint8_t car_num);
void inpark(void);
void isErrorProcess(void);
void lcdclear(void);
int isLeapYear(int year);
long dateToTotalMinutes(struct Times t);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM17_Init();
MX_USART1_UART_Init();
HAL_TIM_Base_Start_IT(&htim2);
HAL_UART_Receive_IT(&huart1,rxdata,1);
/* USER CODE BEGIN 2 */
LCD_Init();
lcdclear();
led_Display(0x00);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
key_process();
usart1_process();
lcd_process();
led_process();
isErrorProcess();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1;
PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void key_process(void)
{
if(key[0].key_single_flag)
{
key[0].key_single_flag = 0;
if(view==1)
{
view = 2;
}else{
view = 1;
}
}
if(key[1].key_single_flag)
{
key[1].key_single_flag = 0;
if(view==2)
{
CNBRprice+=0.5f;
VNBRprice+=0.5f;
}
}
if(key[2].key_single_flag)
{
key[2].key_single_flag = 0;
if(view==2)
{
CNBRprice-=0.5f;
VNBRprice-=0.5f;
}
}
if(key[3].key_single_flag)
{
key[3].key_single_flag = 0;
pwm=!pwm;
if (pwm)
{
HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1);
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,200);
}else{
HAL_TIM_PWM_Stop(&htim17, TIM_CHANNEL_1); // 停止PWM
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET); // 设置PA7为低电平
}
}
}
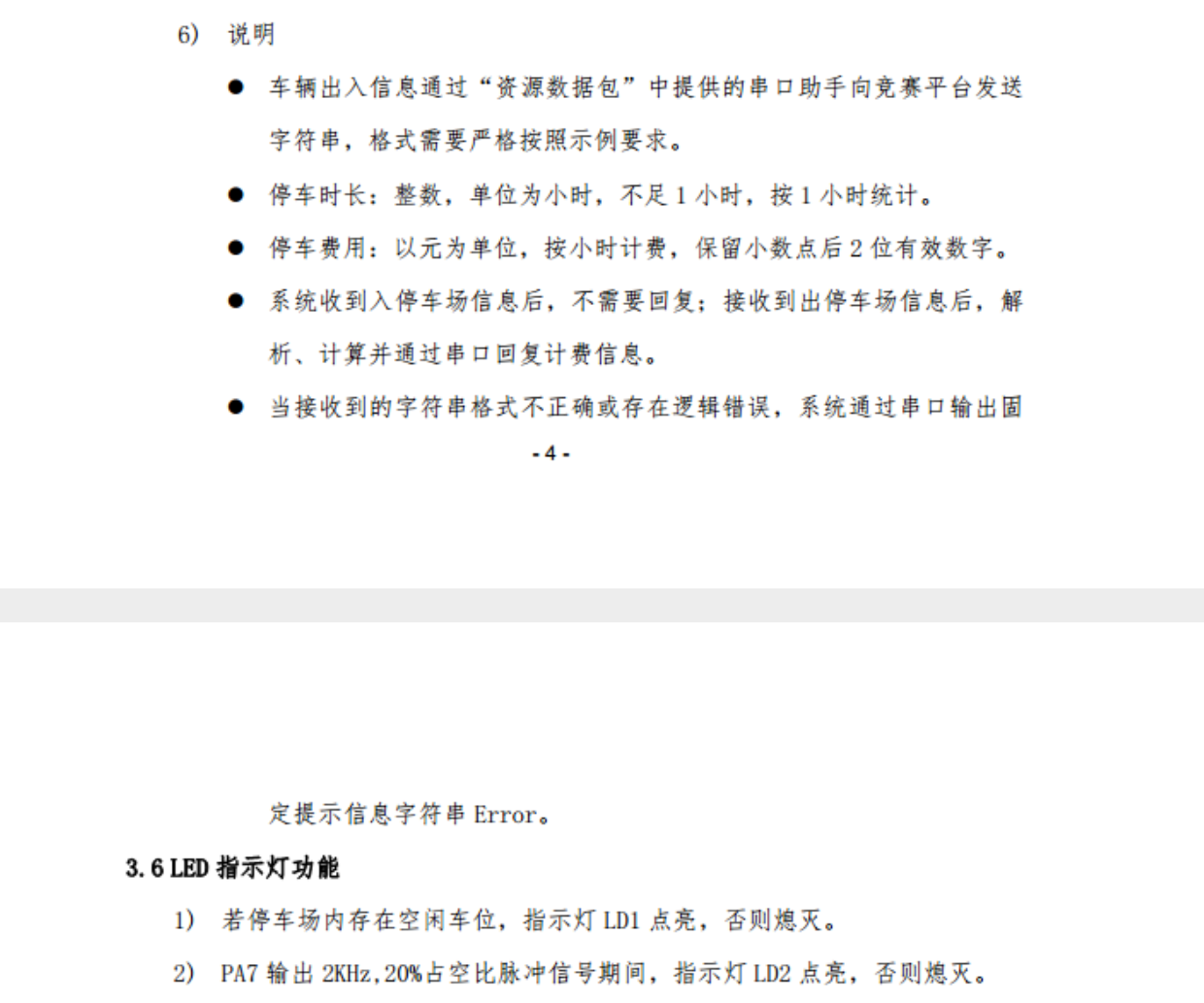
void outpark(uint8_t car_num)
{
sscanf(car.carTime, "%4d%2d%2d%2d%2d", &car.Time.year, &car.Time.month, &car.Time.day, &car.Time.hour, &car.Time.min);
// 计算两个时间点的总分钟数
long carTimeInMin = dateToTotalMinutes(car.Time);
long parkTimeInMin = dateToTotalMinutes(park[car_num].Time);
// 计算经过的总时间(以分钟为单位),并转换为小时
long diffInMin = carTimeInMin - parkTimeInMin;
int hoursPassed = diffInMin / 60;
// 如果不满一小时,则按一小时计算
if(diffInMin % 60 > 0) {
hoursPassed++;
}
// 保证至少为1小时
if(hoursPassed <= 0) {
hoursPassed = 1;
}
if(strcmp(car.carKind,"VNBR") ==0)
{
VNBRnums --;
IDLEnums ++;
stopprice=hoursPassed*VNBRprice;
}else if(strcmp(car.carKind,"CNBR") ==0)
{
CNBRnums --;
IDLEnums ++;
stopprice=hoursPassed*CNBRprice;
}
memset(&park[car_num],0,sizeof(park[car_num]));
sprintf((char *)printtext,"%s:%s:%d:%.2f\r\n",car.carKind,car.carNum,hoursPassed,stopprice);
HAL_UART_Transmit(&huart1,printtext,strlen((char *)printtext),50);
}
void inpark(void)
{
sscanf(car.carTime, "%4d%2d%2d%2d%2d", &car.Time.year, &car.Time.month, &car.Time.day, &car.Time.hour, &car.Time.min);
for (int i = 0; i < 8; i++) {
// 查找第一个空位
if (park[i].carNum[0] == '\0') { // 假设未使用的车位carNum为'\0'
park[i] = car;
// 更新车位统计信息
if (strcmp(car.carKind, "CNBR") == 0) {
CNBRnums++;
IDLEnums--;
} else if (strcmp(car.carKind, "VNBR") == 0) {
VNBRnums++;
IDLEnums--;
}
break; // 退出循环
}
}
}
void usart1_process(void)
{
if(rxflag)
{
rxflag = 0;
rxindex = 0;
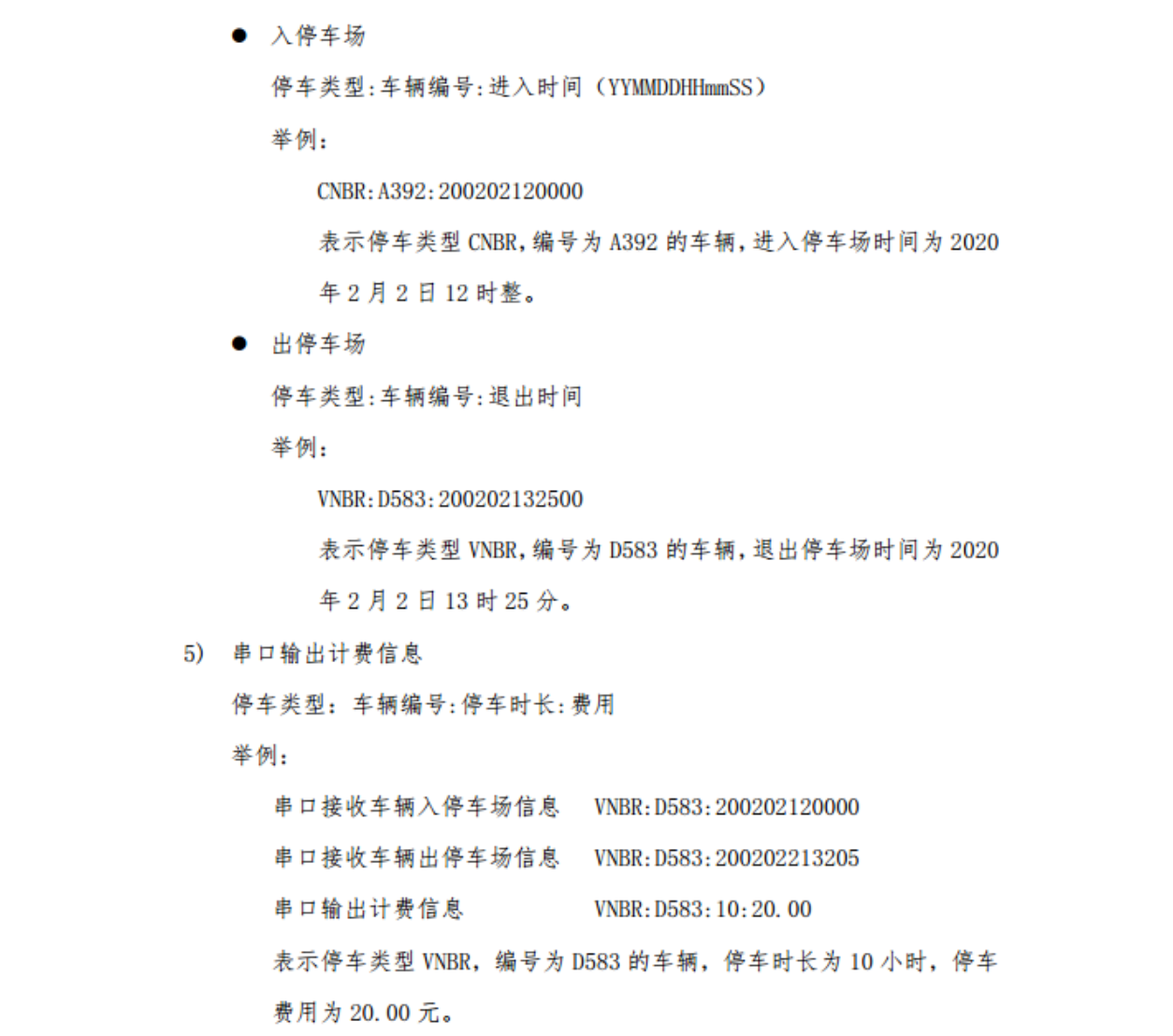
int parsedItems = sscanf((char*)rxbuffer,"%4s:%4s:%12s",car.carKind,car.carNum,car.carTime);
if(parsedItems == 3)
{
if(strcmp(car.carKind,"CNBR")==0||strcmp(car.carKind,"VNBR")==0)//格式正确
{
for(int i = 0;i < 8;i++)
{
if(strcmp(park[i].carNum,car.carNum)==0) //车库中有,需要出库
{
if(strcmp(park[i].carKind,car.carKind) == 0)
{
outpark(i);
break;
}else{
isError = 1;
}
}else if(strcmp(park[i].carNum,car.carNum)!=0&&IDLEnums>0)//车库中没有需要,入库
{
inpark();
break;
}
}
}else
{
isError = 1;
}
}else
{
isError = 1;
}
rxflag = 0;
rxindex = 0;
HAL_UART_Receive_IT(&huart1,rxdata,1);
}
}
void isErrorProcess(void)
{
if(isError == 1)
{
sprintf((char *)printtext,"Error\r\n");
HAL_UART_Transmit(&huart1,(uint8_t*)printtext,strlen((char *)printtext),50);
isError = 0;
}
}
void lcd_process(void)
{
switch (view)
{
case 1://车位显示页面
{
sprintf((char *)lcdtext," Data");
LCD_DisplayStringLine(Line1,lcdtext);
sprintf((char *)lcdtext," CNBR:%d",CNBRnums);
LCD_DisplayStringLine(Line3,lcdtext);
sprintf((char *)lcdtext," VNBR:%d",VNBRnums);
LCD_DisplayStringLine(Line5,lcdtext);
sprintf((char *)lcdtext," IDLE:%d",IDLEnums);
LCD_DisplayStringLine(Line7,lcdtext);
}
break;
case 2: //费率设置页面
{
sprintf((char *)lcdtext," Para");
LCD_DisplayStringLine(Line1,lcdtext);
sprintf((char *)lcdtext," CNBR:%.2f",CNBRprice);
LCD_DisplayStringLine(Line3,lcdtext);
sprintf((char *)lcdtext," VNBR:%.2f",VNBRprice);
LCD_DisplayStringLine(Line5,lcdtext);
}
break;
}
}
void led_process(void)
{
if(IDLEnums>0)
{
led1enable = 1;
}else{
led1enable = 0;
}
if(pwm==1)
{
led2enable = 1;
}else{
led2enable = 0;
}
if(led1enable)
{
led|=0x01;
}else{
led&=~0x01;
}
if(led2enable)
{
led|=0x02;
}else{
led&=~0x02;
}
led_Display(led);
}
void lcdclear()
{
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
}
int isLeapYear(int year) {
if (year % 4 != 0) return 0;
if (year % 100 != 0) return 1;
if (year % 400 == 0) return 1;
return 0;
}
long dateToTotalMinutes(struct Times t) {
// 添加之前的年份所包含的分钟数
long totalMinutes = (t.year - 1) * 365 * 24 * 60;
// 添加闰年的额外分钟数
totalMinutes += ((t.year - 1) / 4 - (t.year - 1) / 100 + (t.year - 1) / 400) * 24 * 60;
// 添加当前年份中之前月份的分钟数
for (int i = 0; i < t.month - 1; i++) {
totalMinutes += monthDays[i] * 24 * 60;
}
// 如果当前年份是闰年并且月份大于2,则额外添加一天的分钟数
if (t.month > 2 && isLeapYear(t.year)) totalMinutes += 24 * 60;
// 添加当前月份中的天数、小时和分钟
totalMinutes += (t.day - 1) * 24 * 60; // 天数减1,因为当天不满24小时
totalMinutes += t.hour * 60;
totalMinutes += t.min;
return totalMinutes;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
- 488
- 489
- 490
- 491
- 492
- 493
- 494
- 495
- 496
- 497
- 498
- 499
- 500
- 501
- 502
- 503
- 504
- 505
- 506
- 507
- 508
- 509
- 510
- 511
- 512
- 513
- 514
- 515
- 516
key.c
#include "key.h"
struct Key key[4]={0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2)
{
key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i = 0;i<4;i++)
{
switch (key[i].key_status)
{
case 0:
{
if(key[i].key_gpio==0)
{
key[i].key_status = 1;
}
}
break;
case 1:
{
if(key[i].key_gpio==0)
{
key[i].key_single_flag = 1;
key[i].key_status = 2;
}else{
key[i].key_status = 0;
}
}
break;
case 2:
{
if(key[i].key_gpio==1)
{
key[i].key_status = 0;
}
}
break;
}
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
led.c
#include "led.h"
void led_Display(uint8_t led)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
usart1.c
#include "usart1.h"
#include "usart.h"
#include "string.h"
uint8_t rxflag;
uint8_t rxdata[1];
uint8_t rxindex = 0;
uint8_t rxbuffer[22];
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)
{
rxbuffer[rxindex++] = rxdata[0];
HAL_UART_Receive_IT(huart,rxdata,1);
if(rxindex==22)
{
rxflag = 1;
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
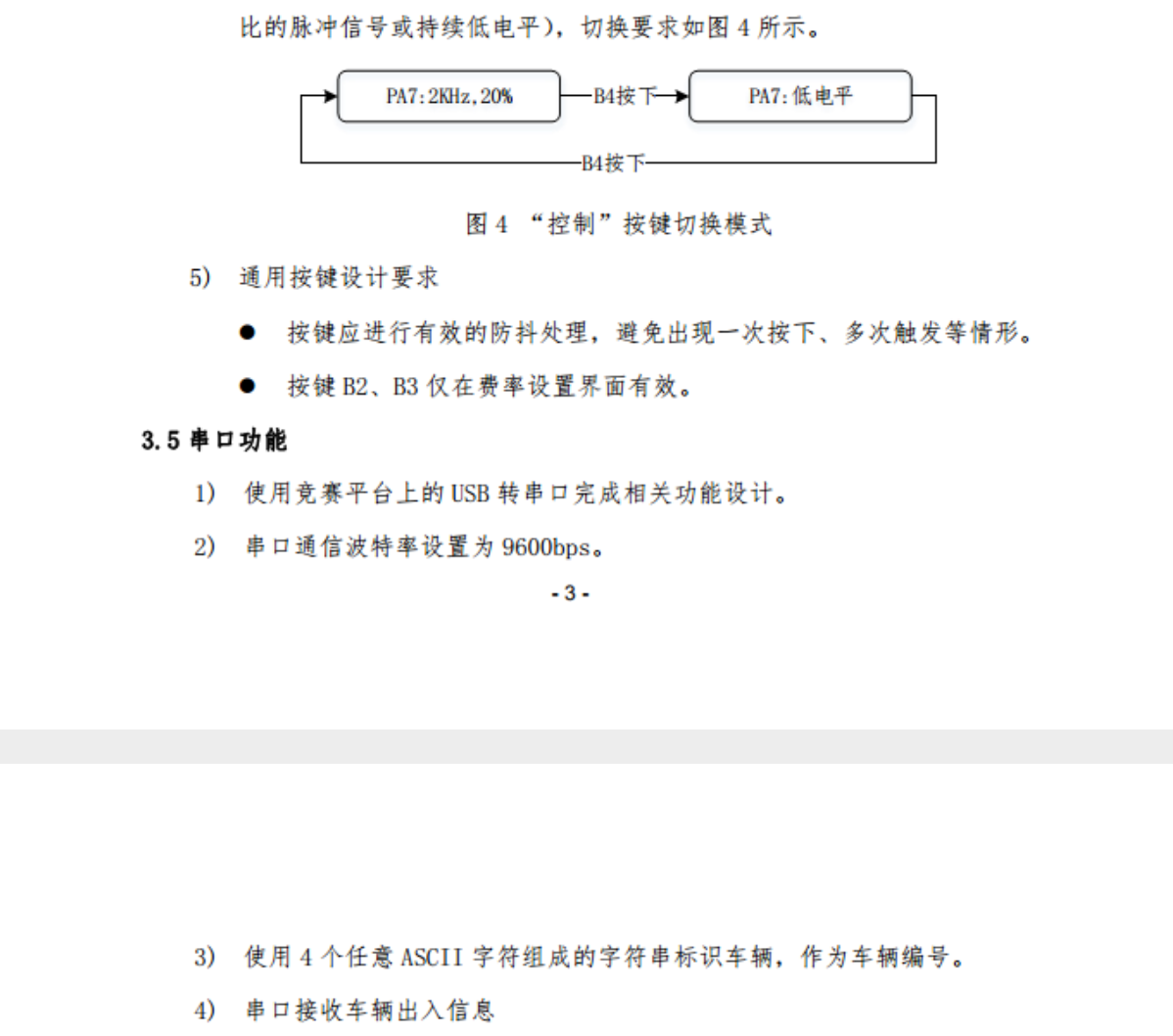
程序很常规,只有串口那里处理比较麻烦,有几个注意事项
- 使用或和与操作实现单独对led某一位进行操作
- 需要判断闰年
- 处理错误,有好几种
- sscanf解析字符串
评论记录:
回复评论: