
Ardupilot开源无人机之Geek SDK进展2024-2025
- 1. 源由
- 2. 状态
- 3. TODO
- 4. Extra-Work
- 5. 同步工作
- 6. 参考资料
- 7. 问题
1. 源由
前期搭建《Ardupilot开源无人机之Geek SDK》,主要目的是:
- 基于:《ArduPilot开源飞控系统 - 无人车、船、飞机等》
- 验证:《Ardupilot & OpenIPC & 基于WFB-NG构架分析和数据链路思考》可行性
- 框架:打通硬实时、软实时的控制面和数据面链路,提供一个简单、多样、高效的验证平台 jetson-fpv
2. 状态
-
框架成型:jetson-fpv
-
支持特性:
-
FPV features (FPV功能)
- MSPOSD for ground station (OSD)
- video-viewer (视频图像,可以达到120FPS)
- Adaptive wireless link (链路自适应)
-
Jetson video analysis (Jetson推理功能)
- detectnet for object detection
- segnet for segmentation
- posenet for pose estimation
- imagenet for image recognition
-
yolo for object detection (YOLO目标检测)
-
Real time video stabilizer
-
DeepStream analysis (DeepStream目标跟踪分析)
- ByteTrack
- NvDCF tracker
-
-
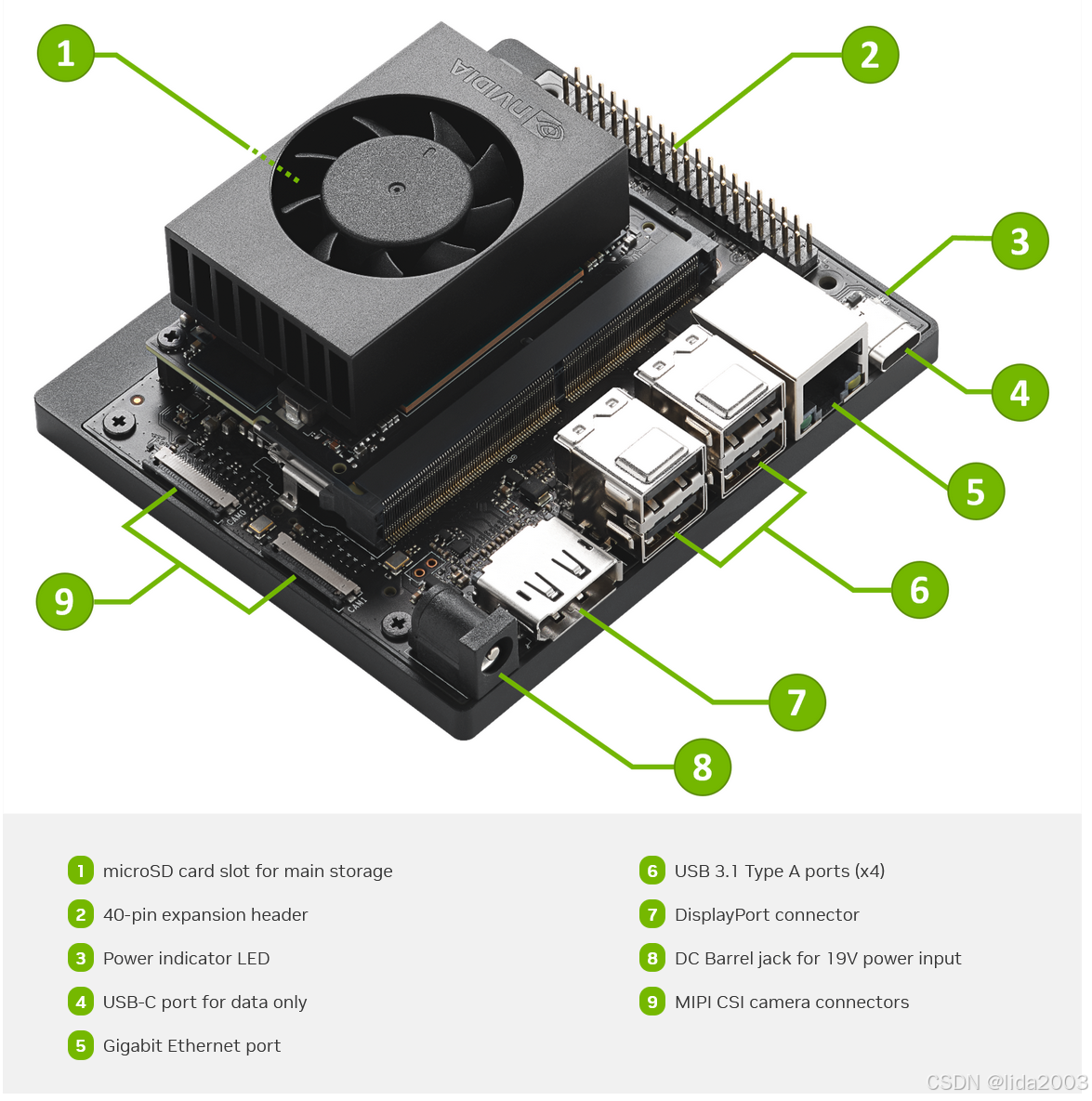
硬件形态

3. TODO
优先级:
- 【0101暂定】3.2 onnxruntime版本 > 3.1 跟踪目标框 > 3.5 Inference性能 > 3.6 特定目标集Training > 3.3 CUDA 11.8版本 > 3.4 pytorch v2.5.1版本
- 【0109变更】3.3 CUDA 11.8版本 > 3.4 pytorch v2.5.1版本 > 3.2 onnxruntime版本 > 3.1 跟踪目标框 > 3.5 Inference性能 > 3.6 特定目标集Training
- 【0117变更】目前NVIDIA主要支持L4T36.x(ubuntu22.04),对L4T35.x(ubuntu20.04)支持力度日渐转弱,进度很慢(尽管官方论坛说没有停止支持)。将不连续帧跟踪目标框持续OSD输出的问题尽快提上日程。
└──> 【完成】3.3 CUDA 11.8版本
│ └──> 【完成】4.1 CUDA 12.3版本
└──> 【完成】3.4 pytorch v2.5.1版本
└──> 【进行中】4.2 TensorRT 8.6
├──> 【进行中】3.2 onnxruntime版本
└──> 【进行中】3.1 跟踪目标框
└──> 3.5 Inference性能
└──> 3.6 特定目标集Training
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 【0120变更】鉴于目前NVIDIA闭源,虽然尚未宣布Jetpack5的EOL时间,但是实际在版本支持和研发投入上,已经明显出现乏力(详见:7.3)!而目前来说Super版本似乎从性能上是一个改观,为此我们后续将投入BSP6.2版本,顺便调整优先级,废弃一些闭源升级问题带来的折腾。
├──> 【暂停】【任务支线一:升级基础组件版本】
│ └──> 【完成】3.3 CUDA 11.8版本
│ │ └──> 【完成】4.1 CUDA 12.3版本
│ └──> 【完成】3.4 pytorch v2.5.1版本
│ └──> 【暂停】4.2 TensorRT 8.6
│ └──> 【暂停】3.2 onnxruntime版本
└──> 【完成】【任务支线二:升级系统Jetson Orin Nano Super,安装jetson-fpv】
└──> 【完成】4.3 Jetpack6.2(Jetson Orin Nano Super)
└──> 【完成】4.4 pytorch + torchvision安装(Jetson Orin Nano Super)
└──> 【完成】4.5 dsyolo/nvdsinfer/byteTrack安装(Jetson Orin Nano Super)
└──> 【完成】4.6 wfb-ng网卡自动侦测
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 【0128变更】中国年,更新下进展,将升级Super系统,安装脚本任务完成,新开任务。
└──> 【完成】【任务支线四:采用隔帧提升性能】
└──> 【完成】3.1 跟踪目标框
└──> 【完成】3.5 Inference性能
- 1
- 2
- 3
- 【0208变更】过年期间,进展更新。
└──> 【完成】【任务支线三:调试每个模块,确保正常工作】
└──> 【阻塞】4.7 jetson-fpv模块测试(Jetpack6.2)
- 1
- 2
- 【0215更新】Jetpack6.2存在很多问题,且开源最新的大部分停留在Jetpack5.x/Jetpack6.1
├──> 【进行中】【任务支线六:调试每个模块,确保正常工作】
│ └──> 【进行中】4.8 jetson-fpv模块测试(Jetpack6.1)
└──> 【进行中】【任务支线五:采用特定训练集训练定制识别】
└──> 【进行中】3.6 特定目标集Training
- 1
- 2
- 3
- 4
3.1 【完成】跟踪目标框
已解决NvDCF算法plugin下bbox连续性问题,详见:deepstream: add tiler to fix bbox issue。该版本Tracking bbox在DS7.1/Jetpack6.2上确实是连续的。据反馈6.3/7.1使用NvDCF应该都是连续的。
注:因为NVIDIA的软件栈有较多版本组合,稍有差异可能会出现各种异常问题。关于版本集成测试方面,需要大量的组合测试,耗时费力,不过这个是作为软件公司,产品开发必须过的一关。
- DeepStream-Yolo - How to keep the bounding boxes when interval is NOT zero? #604
- NVIDIA - How to keep the bounding boxes when interval is NOT zero?
- Python deepstream-test2 substitue from file to H264 RTP source - Perofrmance low
3.2 【暂停】onnxruntime版本
- Yolov8s no bounding box on default settings #597
- NVIDIA - Build onnxruntime v1.19.2 for Jetpack 5.1.4 L4T 35.6 Faild
- microsoft/onnxruntime - Build onnxruntime v1.19.2 for Jetpack 5.1.4 L4T 35.6 Faild #23267
- [Build] Trying to build on a embedded device that doesn’t support BFLOAT16 #19920
- mlas: fix build on ARM64 #21099
通过上面的问题沟通,逐步锁定源头和原因:ARCH对bf16的硬件支持 vs gcc版本问题。
基于Jetpack5.1.4升级gcc11版本
升级CUDA版本11.4.315 到11.8.89
提升3.3 CUDA 11.8任务优先级
需要考虑OpenCV对CUDA的版本依赖问题
- [Build] v1.19.2 abseil_cpp failed: 2 with JP5.1.4 gcc/g++13 #23286
- Build onnxruntime 1.19.2 fail due to API HardwareCompatibilityLevel
3.3 【完成】CUDA 11.8版本
目前,了解到支持的版本状况:CUDA Toolkit Archive
- Ubuntu 20.04 支持到 CUDA 12.3 (同时支持Ubuntu 22.04)
- 从CUDA 12.4开始仅支持Ubuntu 22.04
安装deb文件
$ wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu2004/arm64/cuda-ubuntu2004.pin
$ sudo mv cuda-ubuntu2004.pin /etc/apt/preferences.d/cuda-repository-pin-600
$ wget https://developer.download.nvidia.com/compute/cuda/11.8.0/local_installers/cuda-tegra-repo-ubuntu2004-11-8-local_11.8.0-1_arm64.deb
$ sudo dpkg -i cuda-tegra-repo-ubuntu2004-11-8-local_11.8.0-1_arm64.deb
- 1
- 2
- 3
- 4
复制CUDA密钥
$ sudo cp /var/cuda-tegra-repo-ubuntu2004-11-8-local/cuda-*-keyring.gpg /usr/share/keyrings/
//more specific
$ sudo cp /var/cuda-tegra-repo-ubuntu2004-11-8-local/cuda-tegra-95320BC3-keyring.gpg /usr/share/keyrings/
- 1
- 2
- 3
- 4
安装cuda及其依赖组件
$ sudo apt-get update
$ sudo apt-get -y install cuda
- 1
- 2
3.4 【完成】pytorch v2.5.1版本 - Jetpack5
- pytorch v2.5.1 build for nvidia jetson orin nano 8GB #143624
- Linux 35.6 + JetPack v5.1.4之 pytorch编译
- Linux 35.6 + JetPack v5.1.4之 pytorch升级
- Release pytorch-v2.5.1+l4t35.6-cp38-cp38-aarch64
pytorch 2.5.1 编译:
$ cat ./build.sh
#!/bin/bash
# git clone https://github.com/SnapDragonfly/pytorch.git
# git checkout nvidia_v2.5.1
# git submodule update --init --recursive
export USE_NCCL=0
export USE_DISTRIBUTED=0
export USE_QNNPACK=0
export USE_PYTORCH_QNNPACK=0
export TORCH_CUDA_ARCH_LIST="8.7"
export PYTORCH_BUILD_VERSION=2.5.1
export PYTORCH_BUILD_NUMBER=1
export L4T_BUILD_VERSION=35.6
export USE_PRIORITIZED_TEXT_FOR_LD=1
export USE_FLASH_ATTENTION=0
export PATH=/usr/local/cuda/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
python3 setup.py bdist_wheel

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
pytorch 2.5.1 二进制安装:
$ wget https://github.com/SnapDragonfly/pytorch/releases/download/v2.5.1%2Bl4t35.6-cp38-cp38-aarch64/torch-2.5.1+l4t35.6-cp38-cp38-linux_aarch64.whl
$ sudo pip3 install torch-2.5.1+l4t35.6-cp38-cp38-linux_aarch64.whl
- 1
- 2
torchvision安装:
$ git clone https://github.com/SnapDragonfly/vision.git torchvision
$ cd torchvision
$ git checkout nvidia_v0.20.1
$ export BUILD_VERSION=0.20.1
$ sudo python3 setup.py install --user
$ cd ..
- 1
- 2
- 3
- 4
- 5
- 6
升级JetPack5.1.4 L4T35.6后的版本信息:
Software part of jetson-stats 4.2.12 - (c) 2024, Raffaello Bonghi
Model: NVIDIA Orin Nano Developer Kit - Jetpack 5.1.4 [L4T 35.6.0]
NV Power Mode[0]: 15W
Serial Number: [XXX Show with: jetson_release -s XXX]
Hardware:
- P-Number: p3767-0005
- Module: NVIDIA Jetson Orin Nano (Developer kit)
Platform:
- Distribution: Ubuntu 20.04 focal
- Release: 5.10.216-tegra
jtop:
- Version: 4.2.12
- Service: Active
Libraries:
- CUDA: 11.8.89
- cuDNN: 8.6.0.166
- TensorRT: 8.5.2.2
- VPI: 2.4.8
- Vulkan: 1.3.204
- OpenCV: 4.9.0 - with CUDA: YES
DeepStream C/C++ SDK version: 6.3
Python Environment:
Python 3.8.10
GStreamer: YES (1.16.3)
NVIDIA CUDA: YES (ver 11.4, CUFFT CUBLAS FAST_MATH)
OpenCV version: 4.9.0 CUDA True
YOLO version: 8.3.33
Torch version: 2.5.1+l4t35.6
Torchvision version: 0.20.1a0+3ac97aa
DeepStream SDK version: 1.1.8
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
3.5 【完成】Inference性能
DS7.1 Demo默认是INT8,且性能应该也较之前提升到67TB,1080P@60FPS无压力。
- DeepStream-Yolo - Anyway to boost yolo performance on Jetson Orin? #605
- NVIDIA - Anyway to boost yolo performance on Jetson Orin?
A: DeepStream-Yolo - INT8 calibration (PTQ)
B: NVIDIA - NvDCF tracker plugin
3.6 【进行中】特定目标集Training
4. Extra-Work
4.1 【完成】CUDA 12.3版本
在CUDA 11.8基础上遇到了 Build onnxruntime 1.19.2 fail due to API HardwareCompatibilityLevel问题,貌似API版本不兼容,那么就升到最高支持的12.3尝试下。
For JetPack 5, only CUDA is upgradable but up to v12.2,而这里12.3 貌似升级了一个不正确的版本,请特别注意!!!
$ wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu2004/sbsa/cuda-ubuntu2004.pin
$ sudo mv cuda-ubuntu2004.pin /etc/apt/preferences.d/cuda-repository-pin-600
$ wget https://developer.download.nvidia.com/compute/cuda/12.3.2/local_installers/cuda-repo-ubuntu2004-12-3-local_12.3.2-545.23.08-1_arm64.deb
$ sudo dpkg -i cuda-repo-ubuntu2004-12-3-local_12.3.2-545.23.08-1_arm64.deb
$ sudo cp /var/cuda-repo-ubuntu2004-12-3-local/cuda-5B67C214-keyring.gpg /usr/share/keyrings/
$ sudo apt-get update
$ sudo apt-get -y install cuda-toolkit-12-3
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 版本信息
Software part of jetson-stats 4.2.12 - (c) 2024, Raffaello Bonghi
Model: NVIDIA Orin Nano Developer Kit - Jetpack 5.1.4 [L4T 35.6.0]
NV Power Mode[0]: 15W
Serial Number: [XXX Show with: jetson_release -s XXX]
Hardware:
- P-Number: p3767-0005
- Module: NVIDIA Jetson Orin Nano (Developer kit)
Platform:
- Distribution: Ubuntu 20.04 focal
- Release: 5.10.216-tegra
jtop:
- Version: 4.2.12
- Service: Active
Libraries:
- CUDA: 12.3.107
- cuDNN: 8.6.0.166
- TensorRT: 8.5.2.2
- VPI: 2.4.8
- Vulkan: 1.3.204
- OpenCV: 4.9.0 - with CUDA: YES
DeepStream C/C++ SDK version: 6.3
Python Environment:
Python 3.8.10
GStreamer: YES (1.16.3)
NVIDIA CUDA: YES (ver 11.4, CUFFT CUBLAS FAST_MATH)
OpenCV version: 4.9.0 CUDA True
YOLO version: 8.3.33
PYCUDA version: 2024.1.2
Torch version: 2.5.1+l4t35.6
Torchvision version: 0.20.1a0+3ac97aa
DeepStream SDK version: 1.1.8
onnxruntime version: 1.16.3
onnxruntime-gpu version: 1.18.0
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
4.2 【暂停】TensorRT 8.6
- TensorRT 8.6 GA for Ubuntu 20.04 and CUDA 12.0 and 12.1 DEB local repo Package
- Guide for Upgrading TensorRT
- How to translate xx/x scripts of TensorRT installation?
For JetPack 5, only CUDA is upgradable but up to v12.2.
For JetPack 6, CUDA/cuDNN/TensorRT are upgradable.
4.3 【完成】Jetpack6.2(Jetson Orin Nano Super)
参考:
【1】Linux 36.3@Jetson Orin Nano之系统安装
【2】Jetson Orin Nano Archive系统版本
【3】Linux 36.2@Jetson Orin Nano之基础环境构建
4.3.1 安装系统
- 下载Jetpack6.2
- 安装Linux36.4.3 - Jetson Linux Developer Guide (online version)
- 准备安装环境
$ wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.3/release/Jetson_Linux_r36.4.3_aarch64.tbz2
$ wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.3/release/Tegra_Linux_Sample-Root-Filesystem_r36.4.3_aarch64.tbz2
$ tar xf Jetson_Linux_r36.4.3_aarch64.tbz2
$ sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_r36.4.3_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
$ cd Linux_for_Tegra/
$ sudo ./tools/l4t_flash_prerequisites.sh
$ sudo ./apply_binaries.sh
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 调整IPV6环境
$ sudo vi /etc/sysctl.conf
or
$ sudo sysctl net.ipv6.conf.all.disable_ipv6=0
$ sudo sysctl net.ipv6.conf.default.disable_ipv6=0
- 1
- 2
- 3
- 4
- 5
- 烧录固件(烧录模式)
$ sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit internal
- 1
- 2
- 3
- 接上显示器、键盘、鼠标
启动Jetson Orin Nano,按照桌面提示设置系统,更新系统:
$ sudo apt-get update
$ sudo apt-get upgrade
- 1
- 2
4.3.2 调整sudo继承环境变量
sudo 环境保持与用户环境一致
$ sudo visudo
- 1
!!!继承所有环境变量(注意安全风险),修改为以下内容!!!
Defaults !env_reset
- 1
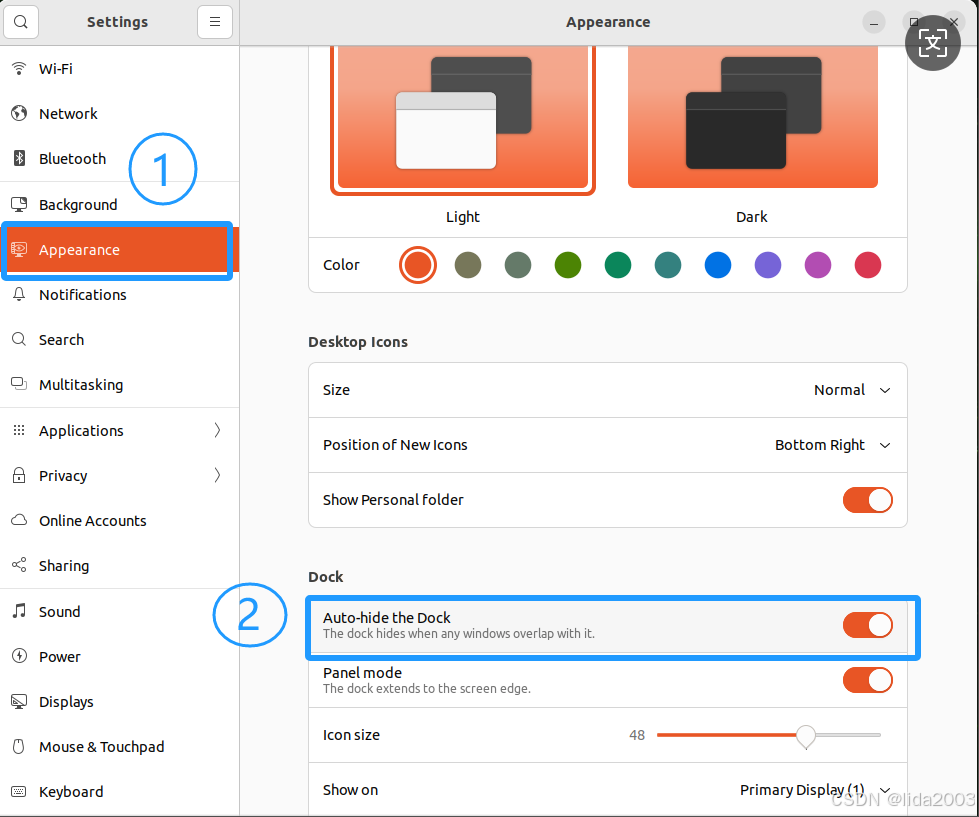
4.3.3 隐藏bar菜单栏
点击进入【Settings】-》【Appearance】-》【Auto-hide the Dock】,隐藏Dock。
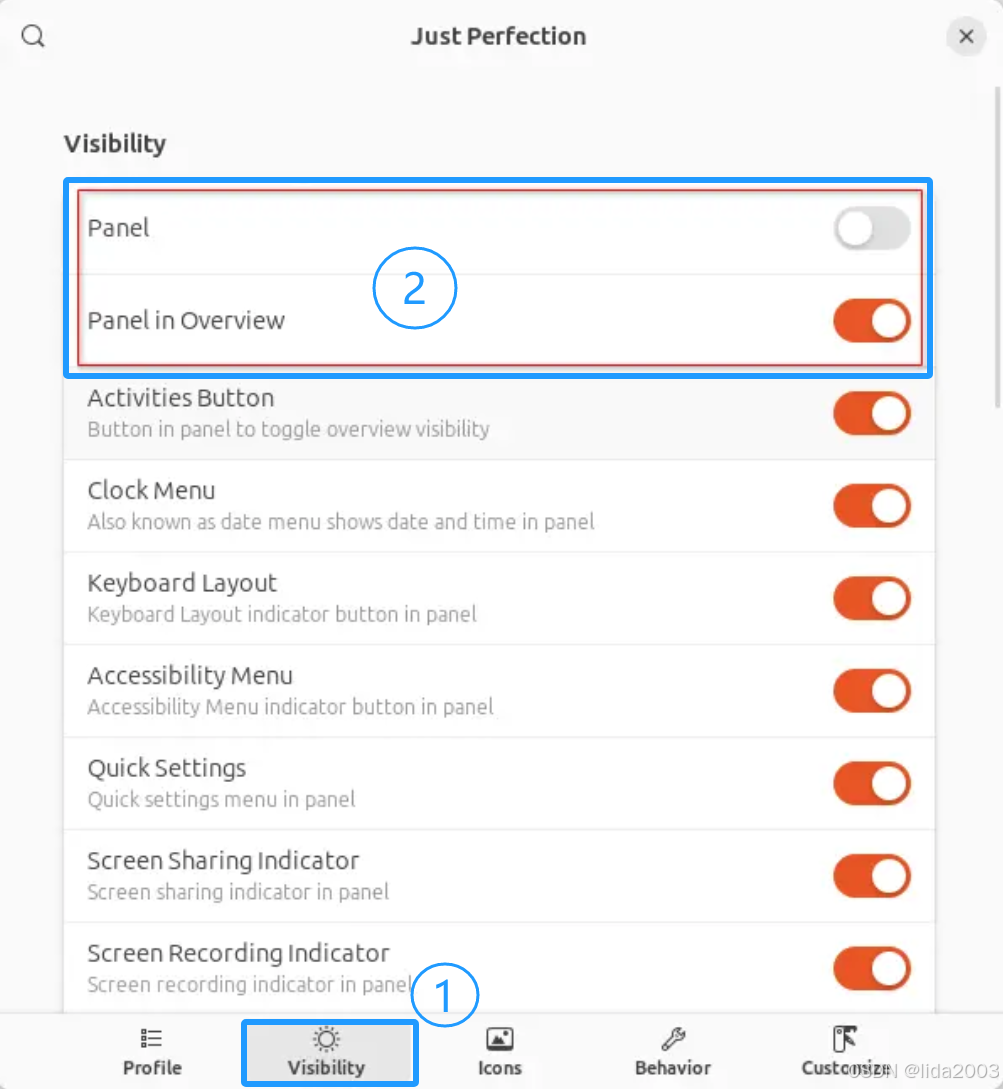
4.3.4 去掉Panel节省像素
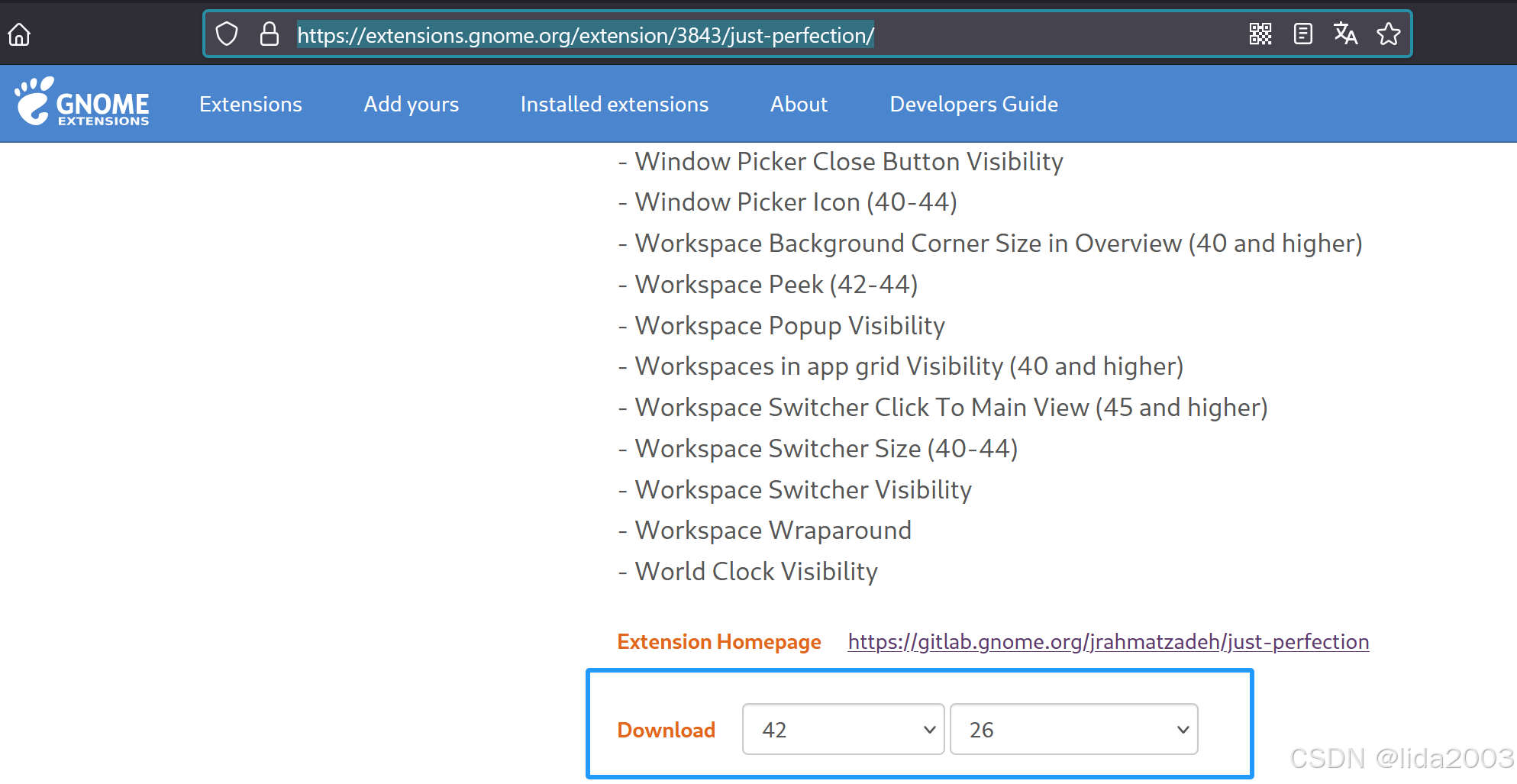
$ mkdir just-perfection-desktop@just-perfection
$ cd just-perfection-desktop@just-perfection
$ unzip just-perfection-desktopjust-perfection.v26.shell-extension.zip
$ cd ..
$ mv just-perfection-desktop@just-perfection ~/.local/share/gnome-shell/extensions/
- 1
- 2
- 3
- 4
- 5
重启GNOME
$ gnome-shell --replace &
- 1
或者按 Alt + F2,输入 r,然后回车。
查看是否安装成功,并启用
$ gnome-extensions list | grep just-perfection
$ gnome-extensions enable just-perfection-desktop@just-perfection
$ gnome-extensions info just-perfection-desktop@just-perfection
just-perfection-desktop@just-perfection
Name: Just Perfection
Description: Tweak Tool to Customize GNOME Shell, Change the Behavior and Disable UI Elements
Path: /home/daniel/.local/share/gnome-shell/extensions/just-perfection-desktop@just-perfection
URL: https://gitlab.gnome.org/jrahmatzadeh/just-perfection
Version: 26
State: ENABLED
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
4.3.5 视频界面去掉title bar节省像素
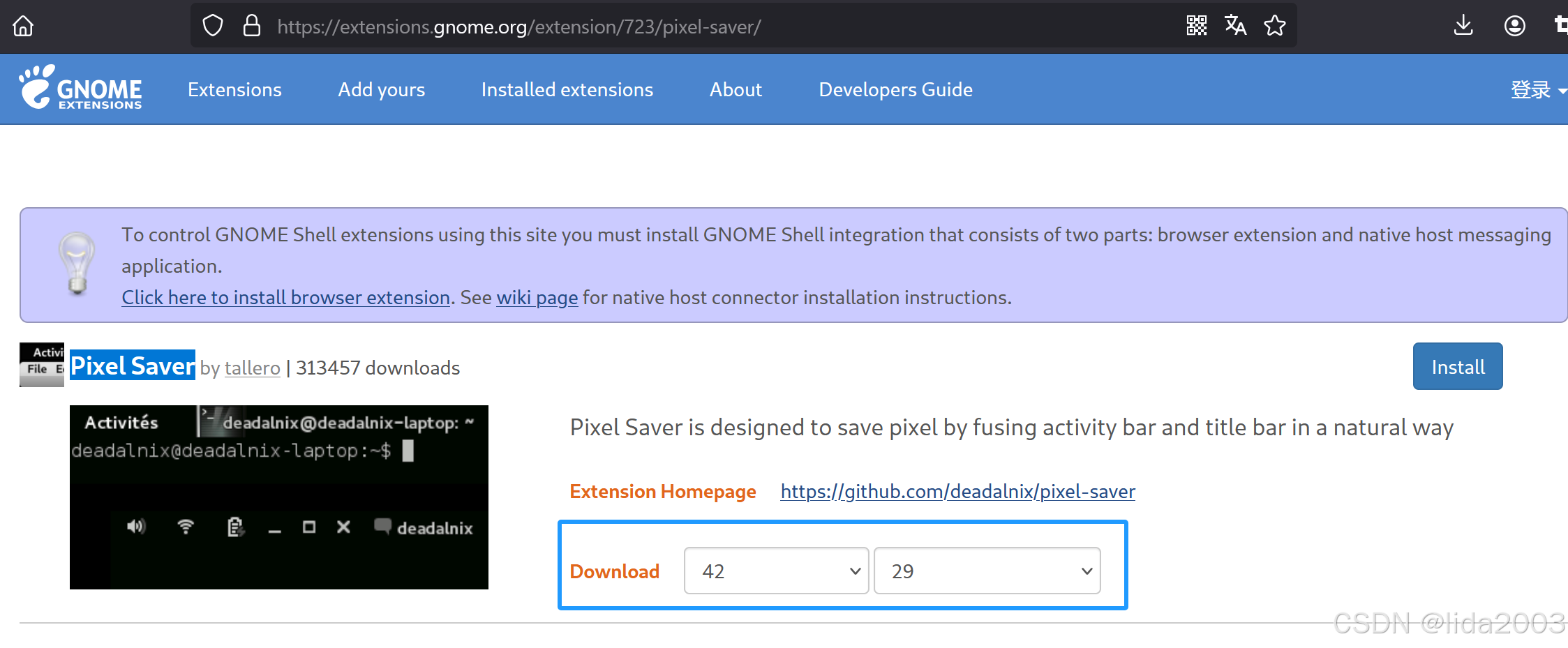
解压GNOME插件
$ mkdir pixel-saverdeadalnix.me
$ mv pixel-saverdeadalnix.me.v29.shell-extension.zip pixel-saverdeadalnix.me
$ cd pixel-saverdeadalnix.me/
$ unzip pixel-saverdeadalnix.me.v29.shell-extension.zip
$ ls
app_menu.js buttons.js decoration.js extension.js metadata.json pixel-saverdeadalnix.me.v29.shell-extension.zip themes util.js
$ cat metadata.json
{
"_generated": "Generated by SweetTooth, do not edit",
"description": "Pixel Saver is designed to save pixel by fusing activity bar and title bar in a natural way",
"name": "Pixel Saver",
"shell-version": [
"3.34",
"3.36",
"3.38",
"40",
"41",
"42",
"43",
"44"
],
"url": "https://github.com/deadalnix/pixel-saver",
"uuid": "[email protected]",
"version": 29
}
$ cd ..
$ mv pixel-saverdeadalnix.me/ [email protected]
$ mv [email protected]/ ~/.local/share/gnome-shell/extensions/
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
重启GNOME
$ gnome-shell --replace &
- 1
或者按 Alt + F2,输入 r,然后回车。
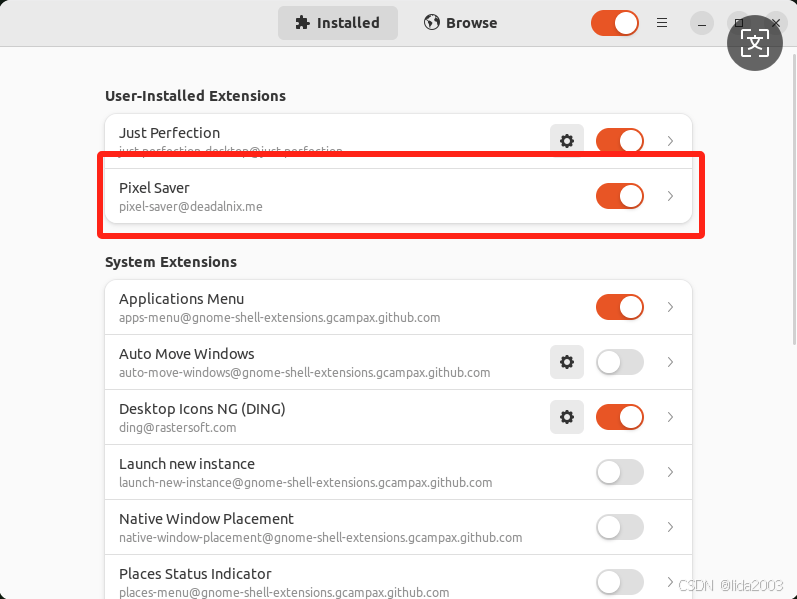
使能插件
$ gnome-extensions list
[email protected]
just-perfection-desktop@just-perfection
[email protected]
[email protected]
[email protected]
[email protected]
native-window-placement@gnome-shell-extensions.gcampax.github.com
[email protected]
screenshot-window-sizer@gnome-shell-extensions.gcampax.github.com
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
$ gnome-extensions enable [email protected]
$ gnome-extensions info [email protected]
[email protected]
Name: Pixel Saver
Description: Pixel Saver is designed to save pixel by fusing activity bar and title bar in a natural way
Path: /home/daniel/.local/share/gnome-shell/extensions/[email protected]
URL: https://github.com/deadalnix/pixel-saver
Version: 29
State: ENABLED
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
4.3.6 jetson-inference打补丁
使用链接中的补丁:Segnet/poseNet Segmentation fault (core dumped) for Jetpack6.2
$ git log -n 1
commit c038530ebf718e6867c4458c3e439406020732ff (HEAD -> master, origin/master, origin/HEAD)
Author: Dustin Franklin <[email protected]>
Date: Wed Oct 16 06:56:03 2024 -0400
updates for TRT10
$ git apply ../../patch/jetson-inference.1925.patch
- 1
- 2
- 3
- 4
- 5
- 6
- 7
4.3.7 其他问题汇总
- 问题A:[Done] nvautoflash不支持刷系统,仅支持刷bootloader - Nvautoflash r36.4.3 jetpack6.2 stucked
- 问题B:
Error writing to /home/daniel/.config/Ultralytics/settings.json: [Errno 13] Permission denied: '/home/daniel/.config/Ultralytics/settings.json'
$ sudo chown -R daniel:daniel /home/daniel/.config/Ultralytics
$ sudo chmod -R u+w /home/daniel/.config/Ultralytics
- 1
- 2
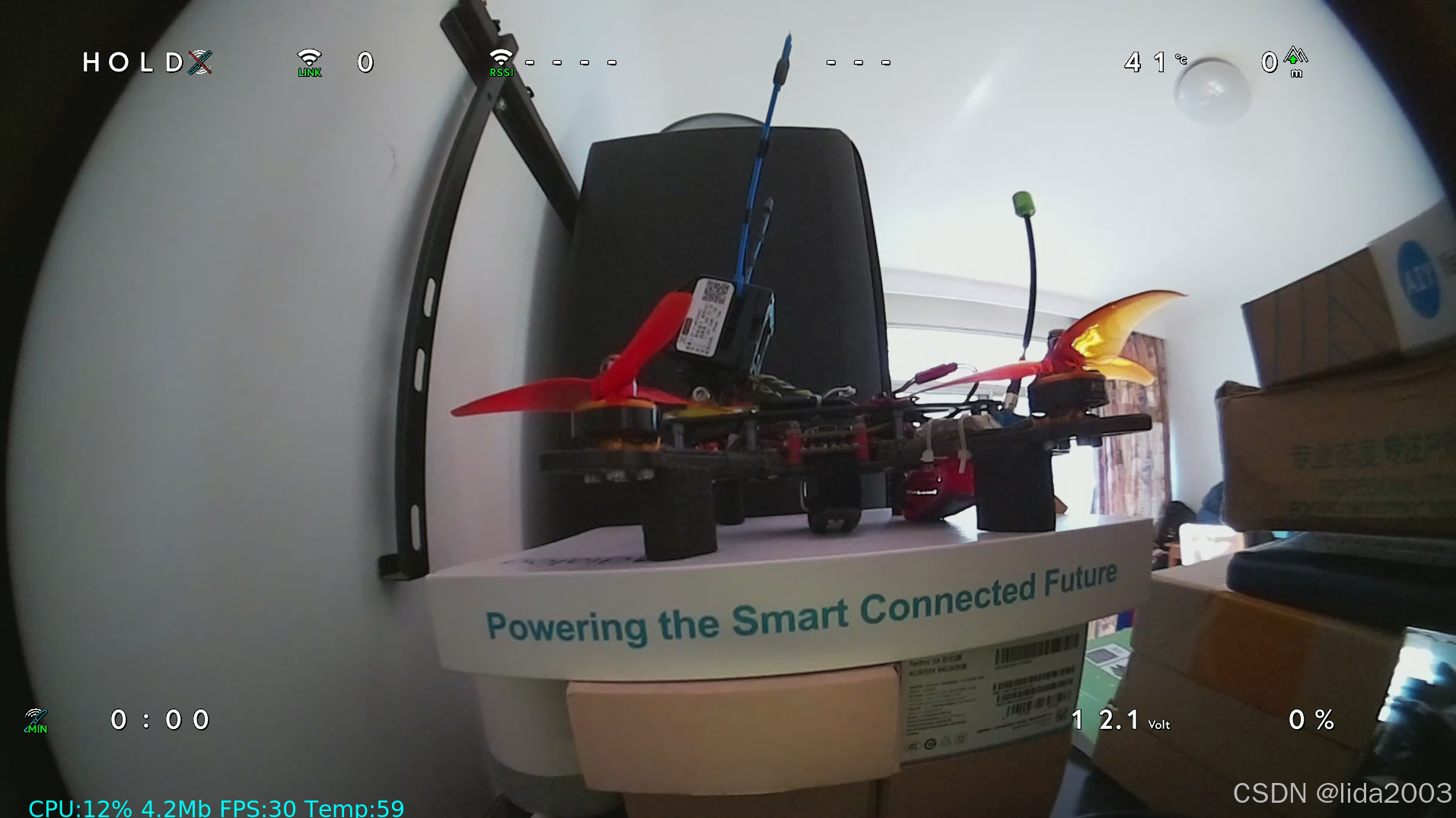
- 装完后的界面应该能够提供jetson-fpv类似全屏效果:
4.4 【完成】pytorch + torchvision安装(Jetson Orin Nano Super)
参考:Jetson Orin Nano Super之pytorch + torchvision安装
Software part of jetson-stats 4.3.1 - (c) 2024, Raffaello Bonghi
Model: NVIDIA Jetson Orin Nano Developer Kit - Jetpack 6.2 [L4T 36.4.3]
NV Power Mode[0]: 15W
Serial Number: [XXX Show with: jetson_release -s XXX]
Hardware:
- P-Number: p3767-0005
- Module: NVIDIA Jetson Orin Nano (Developer kit)
Platform:
- Distribution: Ubuntu 22.04 Jammy Jellyfish
- Release: 5.15.148-tegra
jtop:
- Version: 4.3.1
- Service: Active
Libraries:
- CUDA: 12.6.68
- cuDNN: 9.3.0.75
- TensorRT: 10.3.0.30
- VPI: 3.2.4
- Vulkan: 1.3.204
- OpenCV: 4.11.0 - with CUDA: YES
DeepStream C/C++ SDK version: 7.1
Python Environment:
Python 3.10.12
GStreamer: YES (1.20.3)
NVIDIA CUDA: YES (ver 12.6, CUFFT CUBLAS FAST_MATH)
OpenCV version: 4.11.0 CUDA True
YOLO version: 8.3.65
PYCUDA version: 2024.1.2
Torch version: 2.5.1+l4t36.4
Torchvision version: 0.20.0a0+afc54f7
DeepStream SDK version: 1.2.0
onnxruntime-gpu version: 1.19.2
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
4.5 【完成】dsyolo/nvdsinfer/byteTrack安装(Jetson Orin Nano Super)
- jetson-yolo(deepstream-app)
- libByteTracker.so
- libnvdsinfer_custom_impl_Yolo.so
问题:
4.6 【完成】wfb-ng网卡自动侦测
4.7 【阻塞】jetson-fpv模块测试(Jetpack6.2)
阻塞原因:JP6.2版本兼容性问题:Different behavior (NOT good) of yolov11n on Jetson Orin Nano Super #19134
Jetpack属于闭源软件,其版本从目前看来,会导致稳定性。但是对于非开源类软件,着实没有其他更好的方法。
- 测试环境
$ sudo ./wrapper.sh version
[sudo] password for daniel:
Software part of jetson-stats 4.3.1 - (c) 2024, Raffaello Bonghi
Model: NVIDIA Jetson Orin Nano Developer Kit - Jetpack 6.2 [L4T 36.4.3]
NV Power Mode[0]: 15W
Serial Number: [XXX Show with: jetson_release -s XXX]
Hardware:
- P-Number: p3767-0005
- Module: NVIDIA Jetson Orin Nano (Developer kit)
Platform:
- Distribution: Ubuntu 22.04 Jammy Jellyfish
- Release: 5.15.148-tegra
jtop:
- Version: 4.3.1
- Service: Active
Libraries:
- CUDA: 12.6.68
- cuDNN: 9.3.0.75
- TensorRT: 10.3.0.30
- VPI: 3.2.4
- OpenCV: 4.11.0 - with CUDA: YES
DeepStream C/C++ SDK version: 7.1
Python Environment:
Python 3.10.12
GStreamer: YES (1.20.3)
NVIDIA CUDA: YES (ver 12.6, CUFFT CUBLAS FAST_MATH)
OpenCV version: 4.11.0 CUDA True
YOLO version: 8.3.68
PYCUDA version: 2024.1.2
Torch version: 2.5.0a0+872d972e41.nv24.08
Torchvision version: 0.20.0a0+afc54f7
DeepStream SDK version: 1.2.0
onnxruntime version: 1.20.1
onnxruntime-gpu version: 1.20.0
FPV Environment:
jetson-fpv Version: f52227a
MSPOSD version: c28d645 20250205_151537
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 测试内容:
$ sudo ./wrapper.sh help
Invalid module: help
Usage: ./wrapper.sh <module_name> {start|restart|ostart|orestart|stop|status|help|<other_command>} [additional_arguments]
Commands:
start Start a module
restart Restart a module
ostart Start a module without msposd
orestart Restart a module without msposd
stop Stop a module
status Check the status of a module
help Display this help message
<other_command> Pass any other command directly to the module script, such as test etc.
Available modules
Special modules: version wfb
Base modules: viewer pyviewer gstreamer
Extended modules: imagenet detectnet segnet posenet stabilizer yolo deepstream dsyolo dstrack
Version Module: Check depended component versions.
Wfb Module: Wifibroadcast transmission module.
Viewer Module: Use video-viewer to handle video stream.
pyViewer Module: Use python jetson_utils to handle video stream.
GStreamer Module: GST pipelines to process audio and video, offering flexible, plugin-based support for playback, streaming, and media transformation.
Imagenet Module: Image classification using Imagenet model.
Detectnet Module: Object detection using DetectNet.
Segnet Module: Image segmentation using SegNet.
Posenet Module: Pose estimation using PoseNet.
Stabilizer Module: Stabilizes the camera or system.
Yolo Module: Real-time object detection using YOLO.
Deepstream Module: Framework from NVIDIA that enables video analytics and AI processing, using hardware-accelerated inference for deep learning models in real-time.
Deepstream + YOLO: DeepStream integrates YOLO for real-time object detection and tracking.
Deepstream Track: DeepStream with it's integrated tracking plugin.
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 模拟RTP视频源
H264视频源
$ video-viewer file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4 rtp://@:5600 --input-loop=-1 --headless
- 1
验证H264视频源
$ video-viewer --input-codec=h264 rtp://@:5600
or
- 1
- 2
- 3
分析H264视频源
$ python3 ./utils/yolo.py rtp://@:5600
or
$ python3 ./utils/deepstream/deepstream_NvDCF.py -s -i rtp://@:5600
or
$ python3 ./utils/deepstream/deepstream.py -s -i rtp://@:5600
or ... ...
- 1
- 2
- 3
- 4
- 5
- 6
- 验证进度
├──> [✓] version
├──> [✓] wfb
├──> [✓] viewer
├──> [inference]
│ ├──> [x] imagenet // Not supported, due to caffee model not supported
│ ├──> [x] detectnet // Not supported, due to caffee model not supported
│ ├──> [✓] segnet
│ └──> [✓] posenet
├──> [✓] gstreamer
├──> [x] stabilizer // Not supported yet
├──> [ ] yolo // Under Test
├──> [deepstream]
│ ├──> [✓] deepstream
│ └──> [✓] nvdcf
└──> [x] dsyolo // Not supported, due to deepstream-app code can't handling RTP streaming source
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
遇到问题
- [Done] Does DS6.3 configure file in Jetpack5 compatible with DS71. in Jetpack6.2
- [Done] No resnet18_vehicletypenet_pruned.onnx_b16_gpu0_int8.engine generated in DS7.1
- [Done] Python deepstream-test2 substitue from file to H264 RTP source - Perofrmance low
- [Done] Is there any demo for python video raw file saving?
- [Partially Done] TensorRT 10.3 does not support legacy caffe models for Jetpack6.2
- [Partially Done] How to configure RTP source in deepstream-app 7.1?
- NotImplementedError: Could not run ‘torchvision::nms’ with arguments from the ‘CUDA’ backend #18924
4.8 【进行中】jetson-fpv模块测试(Jetpack6.1)
当然,开源在于舍不舍得投入时间,资源。闭源的问题在于金钱。
鉴于4.7的问题,还是得开一个新的基于Jetpack6.1的任务(至少在Jetpack6.2尚未完全稳定之前是这样)。
-
验证进度(TBD)
├──> [ ] version
├──> [ ] wfb
├──> [ ] viewer
├──> [inference]
│ ├──> [ ] imagenet // Not supported, due to caffee model not supported
│ ├──> [ ] detectnet // Not supported, due to caffee model not supported
│ ├──> [ ] segnet
│ └──> [ ] posenet
├──> [ ] gstreamer
├──> ] stabilizer // Not supported yet
├──> [ ] yolo
├──> [deepstream]
│ ├──> [ ] deepstream
│ └──> [ ] nvdcf
└──> [ ] dsyolo
├──> [ ] deepstream
└──> [ ] nvdcf
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
4.8.1 安装系统
$ wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.0/release/Jetson_Linux_R36.4.0_aarch64.tbz2
$ wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.0/release/Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2
$ tar xf Jetson_Linux_R36.4.0_aarch64.tbz2
$ sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
$ cd Linux_for_Tegra/
$ sudo ./apply_binaries.sh
$ sudo ./tools/l4t_flash_prerequisites.sh
$ sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit internal
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
4.8.2 环境优化
- Linux 36.3@Jetson Orin Nano之系统安装
- Jetson Orin Nano Super之录屏软件安装
- Linux 36.2@Jetson Orin Nano之基础环境构建
- OpenIPC开源FPV之固件sysupgrade升级
- Linux 35.6 + JetPack v5.1.4@python opencv安装
$ sudo apt-get install deepstream-7.1
- 1
4.8.3 问题汇总
鉴于NVIDIA L4T36.4.0(JP6.1) --> L4T36.4.3(JP6.2)直接一个apt-get upgrade就升上去了,而目前的问题是JP6.2有BUG,UBUNTU软件包升级通常采用apt-get upgrade,导致很多UBUNTU上的软件升级脚本会触发JP6.1升级,非常不便于维护。
若要验证,需要非常小心的手工安装!。
5. 同步工作
5.1 需求
- [Closed] [Bug]: The command took too long to execute - Failed to Connect #81
- [Closed] ssc30kq image inconsistency issue - master+3107679, 2025-02-14 #47
- [Closed] [Feature]: Keep Router/OSD index consistent with popup text #82
- [Closed] [Request] ssc338q_fpv_generic_link/ssc30kq_fpv_generic_link #45
- [Partially Done] Is it possible to draw fec_r/lost/d_err on OpenIPC camera? #407
- [Partially Done] [Bug]: 3536 update firmware failed #78
TBD:
- [Feature] Add SNR icon support for ardupilot #52
- [Bug]: SSC30KQ local firmware update failed #80
- Can’t launch msposd on Groud stattion NVR Hi3536dv100 #18
5.2 试飞
- 【OK】OpenIPC+ Ardupilot 4.5.6 + 模拟/数字同步 FPV OSD
- 【OK】OpenIPC地面站OSD + Ardupilot 4.5.6 + 梅家坞山坳 FPV飞行
- 【OK】树莓派3B+OV5647 30FPS/0.76mm/222°FOV 满血复活 - AKM ArduRover4.5.7
- 【NG】Ardupilot 4.5.6+OpenIPC+ELRS RadioFailSafe
5.3 问题
- Most Popular Open-Source Gimbal for ArduPilot in 2025
- “EKF3 IMU1 MAG0 IN-FLIGHT YAW ALIGNMENT” makes auto yaw when takeoff
- Why magfit’s output result is out of parameter range?
- Copter in Acro (Freestle) experiencing RC signal lost Then …
6. 参考资料
【1】Ardupilot & OpenIPC & 基于WFB-NG构架分析和数据链路思考
【2】ArduPilot开源飞控之MAVProxy深入研读系列 - 2蜂群链路
【3】Ardupilot开源飞控之FollowMe计划
【4】Ardupilot开源飞控之FollowMe验证平台搭建
【5】Ardupilot开源无人机之Geek SDK讨论
【6】OpenIPC开源FPV之工程框架
【7】OpenIPC开源FPV之重要源码启动配置
【8】wfb-ng 开源代码之Jetson Orin安装
【9】wfb-ng 开源代码之Jetson Orin问题定位
【10】Linux 35.5 + JetPack v5.1.3@CUDA安装和版本切换
【11】Linux 35.6 + JetPack v5.1.4@yolo安装
【12】Linux 35.6 + JetPack v5.1.4@python opencv安装
【13】Linux 35.6 + JetPack v5.1.4@DeepStream安装
【14】Linux 35.6 + JetPack v5.1.4之RTP实时视频Python框架
【15】Linux 35.6 + JetPack v5.1.4之 pytorch编译
【16】Linux 35.6 + JetPack v5.1.4之 pytorch升级
【17】OpenIPC开源FPV之Adaptive-Link工程解析
【18】NVIDIA DeepStream插件之Gst-nvtracker
【19】Linux 36.3@Jetson Orin Nano之系统安装
【20】Linux 36.2@Jetson Orin Nano之基础环境构建
【21】Jetson Orin Nano Super之pytorch + torchvision安装
【22】Jetson Orin Nano Super之jetson-fpv开源代码下载
【23】Jetson Orin Nano Super之 onnxruntime 编译安装
7. 问题
7.1 风扇启动全速噪音问题
- Crazy loud noise fan early before NVIDIA logo display
- How to set fan pwm io low/high in the early boot stage?
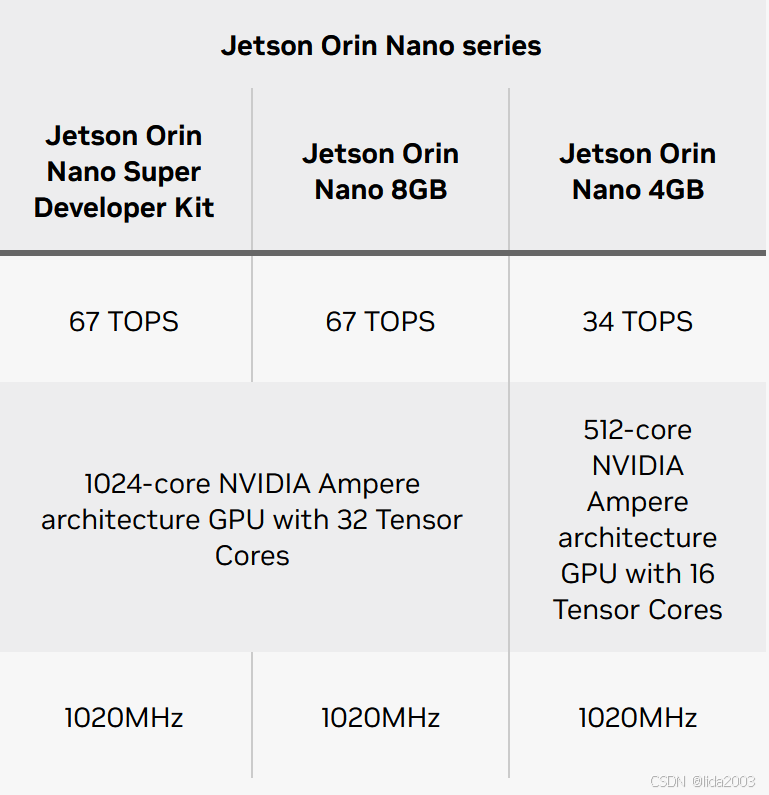
7.2 Jetson Orin Nano Super性能升级
Jetson Orin Nano Super DevKit硬件上稍有差异,但是Jetson Orin Nano只要BSP升级到Jetpack6.2 就具备了67 TOPS性能
- What’s the difference between Jetson Orin Nano vs Jetson Orin Nano Super?
- NVIDIA Jetson Orin - Next-level AI performance for next-gen robotics and edge solutions
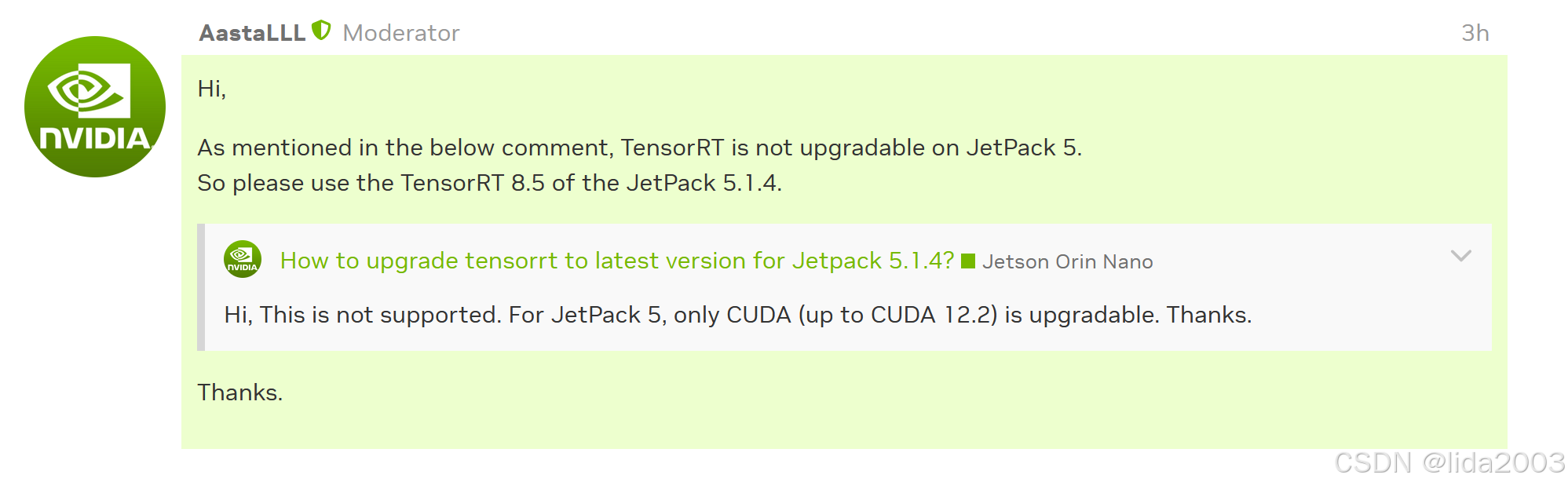
7.3 Jetpack5 TensorRT 8.5不可升级版
鉴于目前NVIDIA反馈在Jetpack5.1.4上TensorRT仅支持到8.5版本,但是从TensorRT 版本发布上看,确实也能看到8.6GA版本【怀疑存在诸多未言明问题】。
虽然,开源也有不少问题,但是随着我们的投入,逐步解决了开源系统的升级编译,但是对于闭源系统,确实非常无奈!
- Has JetPack 5 reached its end of life (EOL), or is there an EOL planned for it?
- How to translate xx/x scripts of TensorRT installation?
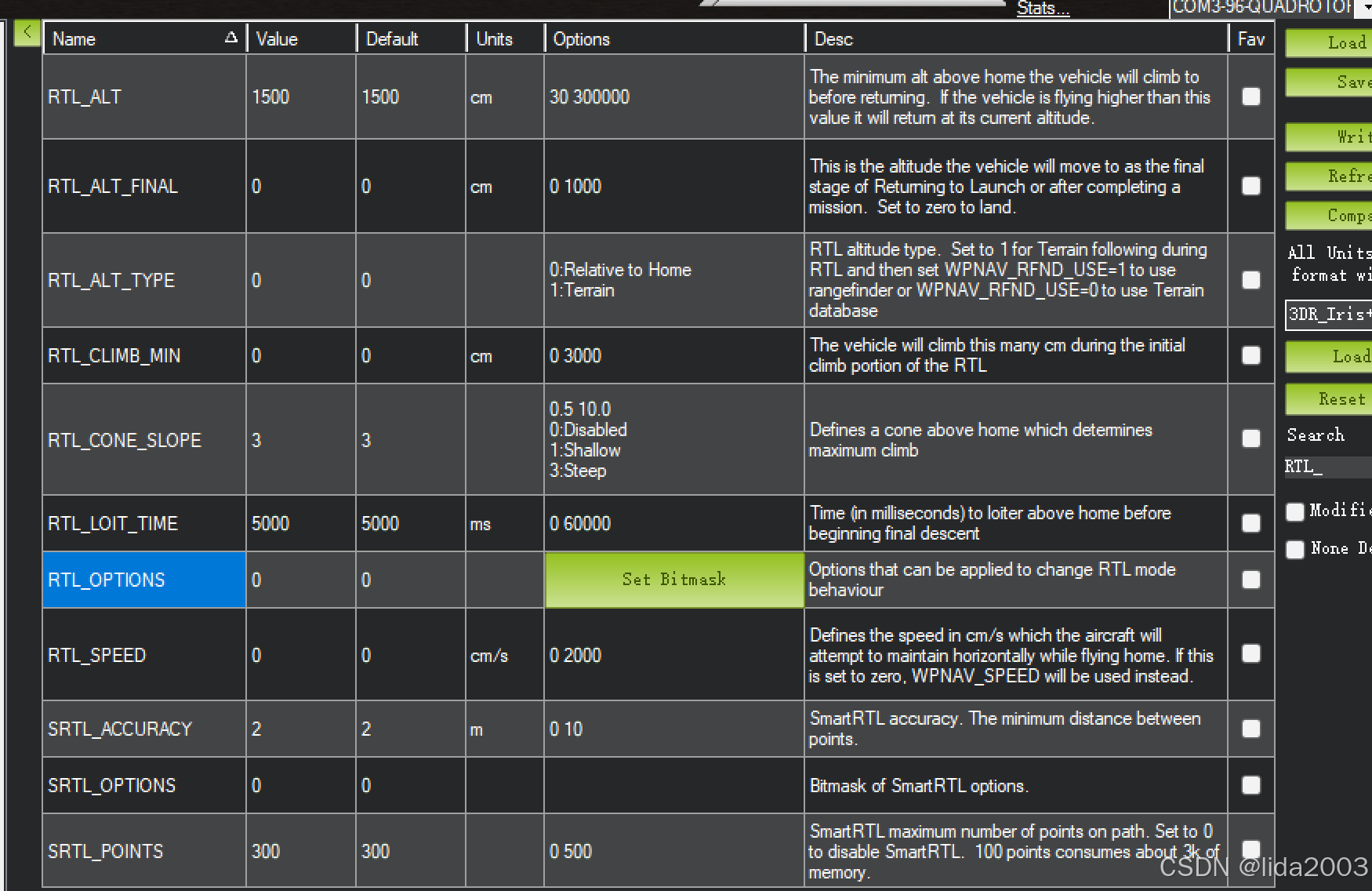
7.4 Ardupilot RTL(Return To Land) 高度
- RTL_ALT
评论记录:
回复评论: