
一、背景与简介
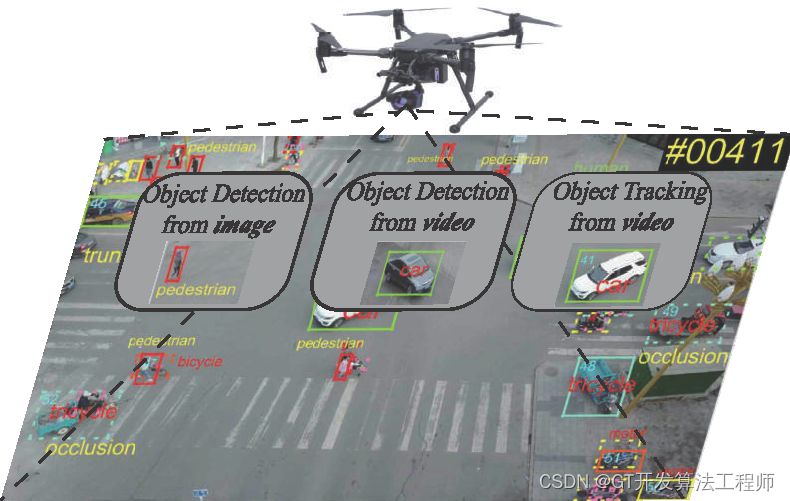
随着无人机技术的快速发展,目标追踪成为无人机应用中的重要功能之一。YOLOv作为一种高效的目标检测算法,同样适用于目标追踪任务。通过集成YOLOv模型,我们可以构建一个无人机前端查看系统,实现实时目标追踪和可视化,为无人机操作员提供直观的操作界面和决策支持。
目录
我们的系统主要包括三个部分:(YOLOv目标检测与追踪模块、无人机控制模块和前端查看界面。)
与YOLOv应用开发类似,我们需要配置一个适合目标追踪的环境。
以下是一个简化的代码示例:展示了如何集成YOLOv模型进行目标追踪,并通过前端查看界面展示结果:
以下是一个简化的前端代码示例,用于展示如何通过WebSocket与后端进行通信,接收实时视频流和目标追踪结果,并在网页上进行展示。
在完成系统开发后,我们需要进行系统测试,确保目标追踪和前端查看功能正常工作。
我们可以期待YOLOv系列的进一步升级改进,以及更多目标追踪的无人机应用场景的出现。
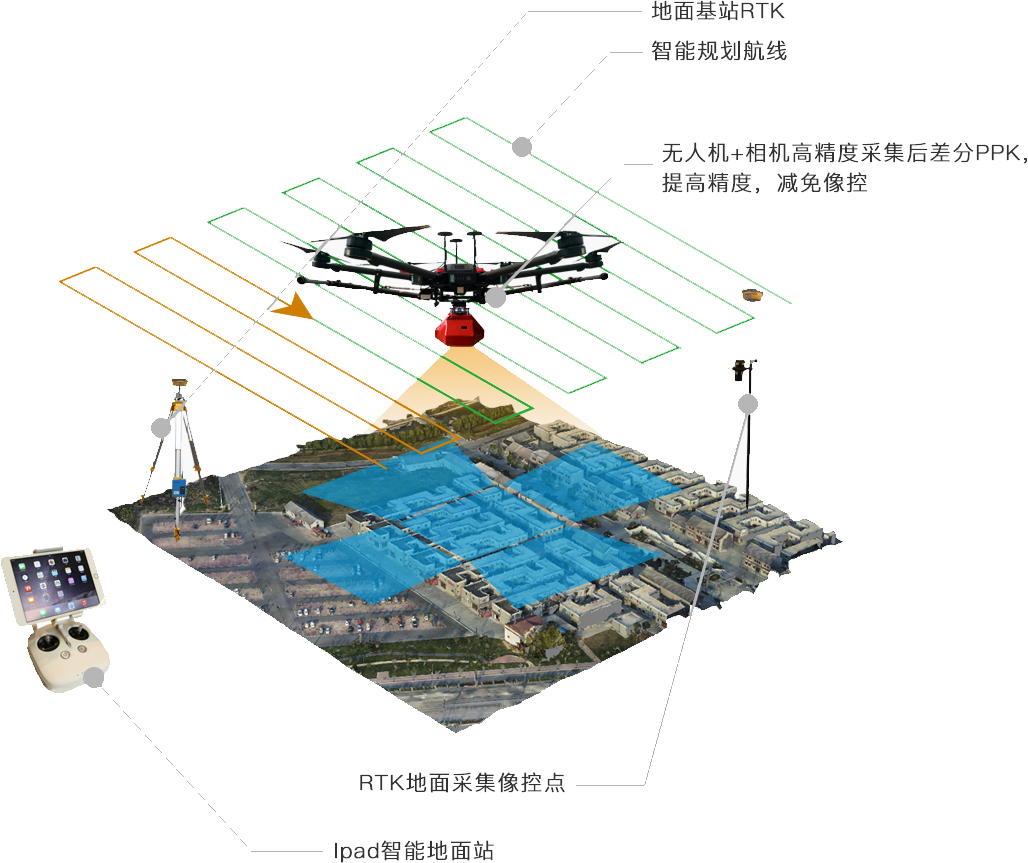
二、系统架构
我们的系统主要包括三个部分:(YOLOv目标检测与追踪模块、无人机控制模块和前端查看界面。)
- YOLOv模块**||**负责实时处理无人机传回的图像,进行目标检测和追踪。
- 无人机控制模块**||**负责接收YOLOv模块的输出,控制无人机的飞行和拍摄。
- 前端查看界面****|**|**则用于展示无人机拍摄的实时视频流和目标追踪结果,提供直观的可视化效果。
三、环境配置
-
与YOLOv应用开发类似,我们需要配置一个适合目标追踪的环境。
-
以下是基于conda的环境配置示例:
conda create -n target_tracking python=3.8
conda activate target_tracking
pip install torch torchvision
pip install opencv-python
pip install dronekit # 无人机控制库
除了安装YOLOv所需的依赖库外,还需要安装无人机控制相关的库和工具。
四、代码实现
-
以下是一个简化的代码示例:展示了如何集成YOLOv模型进行目标追踪,并通过前端查看界面展示结果:
import cv2
import torch
from models.experimental import attempt_load
from utils.general import non_max_suppression, scale_coordinates
from dronekit import connect, VehicleMode, LocationGlobalRelative加载YOLOv模型
model = attempt_load(‘yolov5s.pt’, map_location=torch.device(‘cpu’))
classes = [‘person’, ‘car’, ‘bike’, …] # 目标类别列表连接无人机
vehicle = connect(‘127.0.0.1:14550’, wait_ready=True)
vehicle.mode = VehicleMode(“GUIDED”)初始化前端查看界面
cap = cv2.VideoCapture(‘tcp://127.0.0.1:14550/video_feed’)
window_name = ‘无人机前端查看’
cv2.namedWindow(window_name)while True:
ret, frame = cap.read()
if not ret:
break# 将图像转换为模型所需的格式 img = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) img = torch.from_numpy(img).to(torch.float32) / 255.0 # 进行目标检测与追踪 pred = model(img)[0] pred = non_max_suppression(pred, conf_thres=0.5, iou_thres=0.4) # 可视化追踪结果 for det in pred: if len(det): det[:, :4] = scale_coordinates(img.shape[2:], det[:, :4], frame.shape).round() for *xyxy, conf, cls in reversed(det): label = f'{classes[int(cls)]} {conf:.2f}' cv2.rectangle(frame, (xyxy[0], xyxy[1]), (xyxy[2], xyxy[3]), (0, 255, 0), 2) cv2.putText(frame, label, (xyxy[0], xyxy[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2) # 显示前端查看界面 cv2.imshow(window_name, frame) if cv2.waitKey(1) & 0xFF == ord('q'): break- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
断开无人机连接
cap.release()
vehicle.close()
cv2.destroyAllWindows()

五、前端代码实现
-
JavaScript (main.js)
const videoElement = document.getElementById(‘video’);
const overlayCanvas = document.getElementById(‘overlay’);
const overlayContext = overlayCanvas.getContext(‘2d’);// 初始化WebSocket连接
const socket = new WebSocket(‘ws://localhost:8080’); // 假设后端WebSocket服务运行在本地8080端口// 处理来自后端的视频流
socket.onmessage = function(event) {
const blob = new Blob([event.data], { type: ‘video/webm; codecs=vp9’ });
const videoUrl = URL.createObjectURL(blob);
videoElement.src = videoUrl;
videoElement.play();
};// 处理来自后端的目标追踪数据
socket.ontrack = function(event) {
const { x, y, width, height } = event.data;
drawBoundingBox(x, y, width, height);
};// 在视频上绘制边界框
function drawBoundingBox(x, y, width, height) {
overlayCanvas.width = videoElement.videoWidth;
overlayCanvas.height = videoElement.videoHeight;
overlayContext.clearRect(0, 0, overlayCanvas.width, overlayCanvas.height);
overlayContext.beginPath();
overlayContext.rect(x, y, width, height);
overlayContext.stroke();
}// 连接建立后发送请求视频流的消息
socket.onopen = function() {
socket.send(JSON.stringify({ type: ‘request_video_stream’ }));
};// 处理连接关闭事件
socket.onclose = function() {
console.log(‘WebSocket connection closed.’);
};// 处理连接错误事件
socket.onerror = function(error) {
console.error(‘WebSocket error:’, error);
};
在这个示例中:
- 前端通过WebSocket与后端建立连接,并监听
onmessage事件来接收实时视频流数据。一旦接收到视频流数据,它创建一个Blob对象,然后将其转换为Object URL,并将其设置为**元素**的src属性,从而开始播放视频。- 同时,前端还监听一个自定义的**
ontrack**事件,该事件由后端触发,用于发送目标追踪结果。一旦接收到追踪结果,前端使用drawBoundingBox函数在视频上绘制相应的边界框。
六、系统测试与优化
系统测试
- 我们可以使用不同的测试场景和目标对象来测试系统的性能。通过比较实际输出与预期输出,我们可以评估系统的准确性和可靠性。
性能优化
- 为了提高目标追踪的准确性和实时性,我们可以对YOLOv模型进行调优,如调整模型参数、使用更高效的推理引擎等。同时,我们还可以优化前端界面的渲染性能,如使用Web Worker进行数据处理、使用GPU加速绘制等。
七、未来展望



- 本文介绍了基于YOLOv的目标追踪与无人机前端查看系统的开发过程。
- 通过集成YOLOv模型、设计后端API、实现WebSocket通信以及开发前端界面,我们构建了一个实时目标追踪和前端查看系统。
该系统为无人机操作员提供了直观的操作界面和决策支持,具有广泛的应用前景。
评论记录:
回复评论: